Deep learning-based prediction method for chamber pressure field in shield machines
-
摘要: 土舱压力是盾构机受力状态和掌子面稳定等核心问题中的关键因素。土舱压力具有显著的空间变异性,其形成演化机制源于装备与岩土之间的复杂耦合作用,与地质特征、掘进参数等多源参数相关。然而,现有土舱压力预测方法一般未考虑空间分布特征或地质参数影响。针对该问题,提出了一种基于空间分布物理特征函数导引深度学习的盾构机土舱压力场预测方法。该方法构建物理特征函数用于解耦土舱压力空间分布特征,采用卷积神经网络和门控循环单元分别提取多源参数历史信息的空间特征和特征系数的时序特征,结合多源参数实时信息对特征系数进行预测,从而实现土舱压力场的预测。以长沙地铁四号线某区段为案例,利用该方法准确预测了土舱压力空间分布实测数据,准确率高达0.98,验证了所提方法的有效性。敏感性分析表明,不同地层中土舱压力空间分布特征系数的主要敏感参数基本一致,但其敏感度随地层地质条件的变化规律差异显著,可为复杂地层盾构机土舱压力精细化调控提供参考。Abstract: The chamber pressure is a key factor in the core issues of the stress state of equipment and the stability of tunnel face during shield tunneling. It exhibits significant spatial variability, and its formation and evolution originate from the complex coupling effects of geotechnics and mechanism, which is related to multiple parameters such as geological features and tunnelling parameters. Yet, the spatial distribution features or geological features are generally ignored in the existing methods for predicting the chamber pressure. To probe this problem, a method to predict the chamber pressure field in shield machines is proposed based on the deep learning algorithm guided by the physical feature function of spatial distribution. This method constructs the physical feature function for decoupling the spatial distribution features of the chamber pressure, uses the convolutional neural network and gated recurrent unit to extract the spatial features of the historical information of multi-source parameters and the temporal features of feature coefficient, respectively, and combines the real-time information of multi-source parameters to predict the feature coefficient, so as to realize the prediction of the chamber pressure field. Taking a section of Changsha Metro Line 4 as a case study, this method is used to accurately predict the measured spatial distribution of the chamber pressure with an accuracy of 0.98, which verifies the effectiveness of the proposed method. The sensitivity analysis reveals that the main sensitive parameters of the spatial distribution feature coefficient of the chamber pressure are basically the same in different strata, but their sensitivities vary significantly with the geological conditions of strata. The results may provide guidance for the refined control of the chamber pressure of shield machines in complex strata.
-
0. 引言
21世纪以来,中国城市轨道交通建设步入快速发展阶段。截至2021年底,中国城市轨道交通运营线路总长度达9206.8 km,运营里程全球第一。其中地铁运营里程为7209.7 km[1],占比78.3%。盾构法是城市交通隧道建造的主要工法,被广泛应用于全国主要城市地铁建设。然而,盾构法施工仍面临一系列工程问题,如掌子面失稳、姿态超限、埋机等[2-3]。这些工程问题中蕴含的关键科学问题是如何准确预测和调控盾构机受力状态。
土舱压力是确定盾构机受力状态的关键因素[4-5]。盾构掘进过程本质上是装备和岩土的耦合作用。土舱压力动态演化规律复杂,不仅具备时变性且具有显著的空间变异性。土舱压力的时空演化规律是源自多个系统的众多参数耦合作用的结果[6-7]。这些参数包括岩土方面的岩土力学性质、地下水位、掌子面前方静止土压力等[8-10],装备控制方面的刀盘转速、掘进速度、螺旋输送机转速、油缸液压、泡沫改性剂配合比等[11-14]。这些参数与土舱压力关联机制复杂,且参数间存在耦联效应,难以利用数学或数值模型全面、准确地描述。因此,目前如何建立多源参数与土舱压力的关系,并预测土舱压力空间分布,仍然是困扰土舱压力精准控制的难题。
近年来,随着人工智能和大数据等领域技术革新,数据驱动模型展现出能够描述高维变量间复杂非线性关系的卓越能力,已被成功应用于多个科学和工程领域[15-16],为解决土舱压力预测问题提供了一个新的思路。比如,数据驱动模型在隧道工程领域已有诸多探索,如复合地层盾构切口泥水压力的预测[17]、岩溶地层盾构掘进参数的预测[18]、盾构掘进引起地表最大沉降的预测[19]等。具体到土舱压力预测领域,Yeh [20]最早使用BP神经网络基于推进速度和螺旋机钻速预测及控制土舱压力,后续一些研究采用支持向量机(SVM)、并行支持向量机(LS-SVM)、门控循环单元(GRU)等数据驱动模型对土舱压力进行预测,并且逐步引入了刀盘、改性剂等影响因素[21-24]。这些研究的输入参数多局限于装备方面参数,而对于岩土方面参数,亦或忽略,亦或仅考虑其厚度影响。然而,岩土参数是影响土舱压力演化的决定性因素,忽略或未充分考虑其影响,势必会影响数据驱动模型的准确性和泛化性。
针对上述问题,本文构建了一种能够充分挖掘施工、地质参数的时空演化特征的卷积神经网络-门控循环单元混合算法,基于该算法提出了一种基于空间分布物理特征函数导引深度学习的盾构机土舱压力场预测方法;并以长沙地铁四号线六沟泷—望月湖区间为例,探讨了所提方法的有效性。
1. 土舱压力空间分布特征
土舱压力具有显著的空间变异性,该空间变异性包含多个组分,比如上下梯度和左右梯度等。不同组分的物理诱因不同。上下梯度源于掌子面土水压力梯度和土舱内渣土自重[25];而左右梯度反映刀盘旋转方向、速度以及渣土流动性等影响[26]。因此,本文认为可解耦土舱压力的空间分布特征,从而实现预测目标变量的降阶。
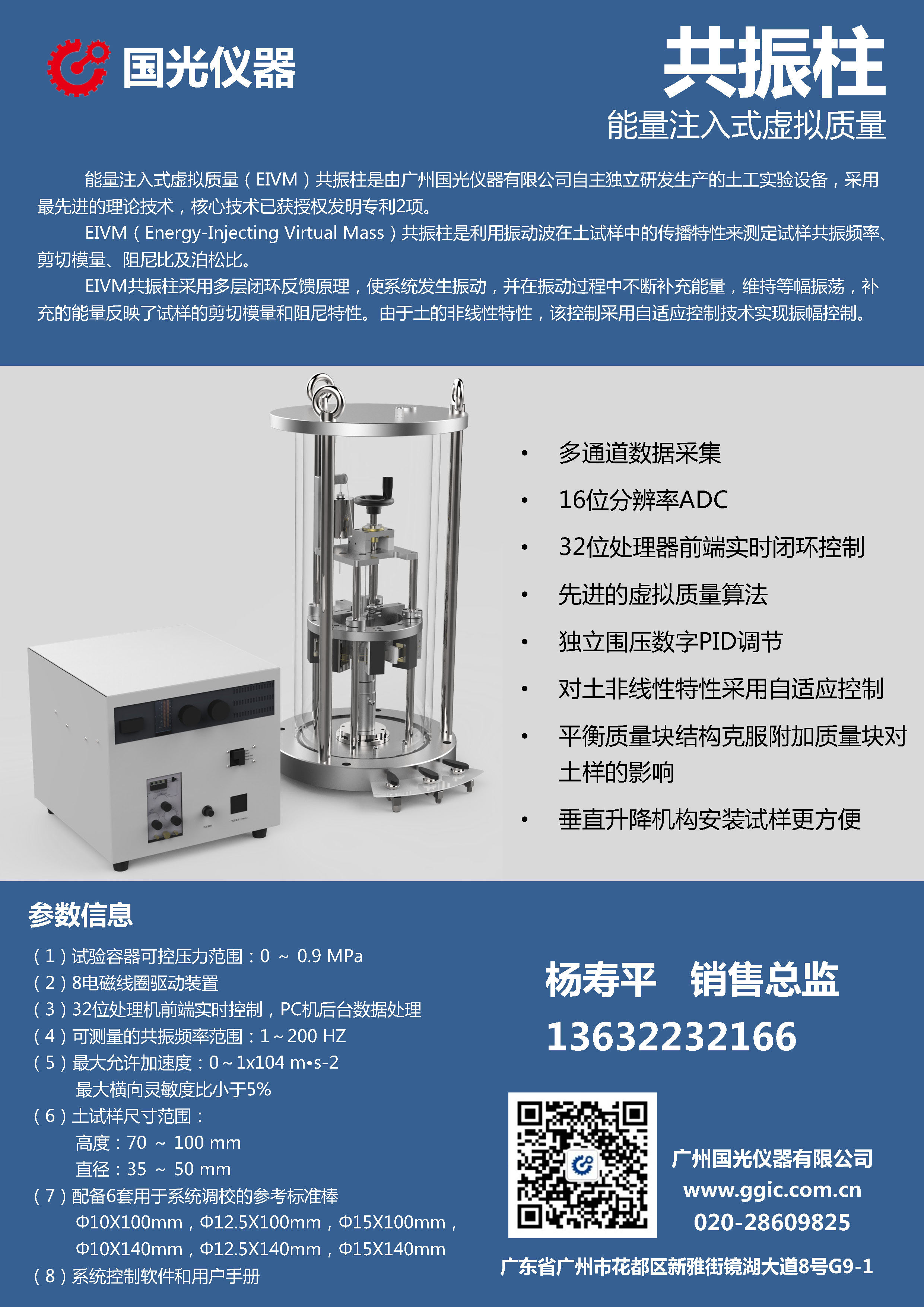
为此,本文构建了适用于描述土舱压力空间分布的物理特征函数。土舱压力由4项组成,分别为均值项、上下梯度项、左右梯度项及局部异质项:
P(θ,r)=[a+bcos(θ)+csin(θ)+dcos(2θ)]g(r)。 (1) 式中:P(θ,r)为土舱压力;坐标系是以土压舱几何中心为极点,竖直向上为极轴的极坐标系,θ为极角,r为极径;g(r)为径向系数;a,b,c,d分别为均值项、上下梯度项、左右梯度项及局部异质项的特征系数。
图 1为本文所提出的土舱压力空间分布特征函数的示意图。图中,o为极坐标的极点,ox为极坐标极轴,θ为极坐标极角,z轴表示物理特征函数各项大小。如图 1所示,物理特征函数的第一项不随极角发生变化,为土舱压力的平均值;第二项随极角的增加呈现先减小后增大的趋势,且在土舱下部值最小,当其系数b为负值时,为土舱压力的上下梯度;第三项随极角的增加呈现先增大后减小再增大的趋势,在土舱左侧值最大,在土舱右侧值最小,为土舱压力的左右梯度;第四项随极角波动,为土舱压力的局部异质性。综上,物理特征函数可解耦土舱压力的空间分布特征。由此,可以将土舱压力数值预测问题转化为土舱压力空间分布特征函数的特征系数预测问题。转化后问题物理意义更为明确,且输出维度大幅降低,有望提高数据驱动模型的预测精度和泛化能力。
![]() 图 1 物理特征函数三维示意图Figure 1. Three-dimensional schematic diagram of physical feature function
图 1 物理特征函数三维示意图Figure 1. Three-dimensional schematic diagram of physical feature function2. 卷积神经网络-门控循环单元算法
为充分挖掘盾构掘进过程中装备和岩土的多源参数特征,并通过深度学习建立其与土舱压力映射关系,本文提出了改进的卷积神经网络(CNN)和门控循环单元(GRU)混合算法。该算法包含4个模块:参数特征卷积模块、时序特征提取模块、特征串联预测模块和特征函数输出模块,如图 2所示。
传统卷积神经网络-门控循环单元混合算法[27-29],以CNN提取参数历史信息特征,以GRU提取参数时序特征,两部分特征串联后接入全连接层输出预测结果。然而,土舱压力动态演化规律复杂,不仅具备时变性且具有显著的空间变异性。因此,相较于传统算法采用相同参数输入CNN与GRU,改进算法中的参数特征卷积模块以施工参数及地质参数的历史信息输入CNN,充分发挥其对多源参数特征的整合提取能力[30-32];时序特征提取模块则以土舱压力解耦后的特征系数输入GRU,高效学习特征系数序列长期依赖特征的同时[33],突出空间变异性的影响。CNN与GRU输出特征分别对应了土舱压力空间分布的外在影响因素和内在变化规律。特征串联预测模块在前两模块输出特征基础上,额外增加了施工参数及地质参数的实时信息作为输入,强化当前施工步对下一施工步的影响,增强土舱压力分布规律预测的连续性及合理性。最终,特征函数输出模块以预测所得土舱压力空间分布特征系数作为输入,基于物理特征函数导引输出土舱压力空间分布。
改进混合算法中参数特征卷积模块由卷积层、池化层、全连接层组成。卷积层设置为2层,采用二维卷积(Conv2D),用于提取施工参数和地质参数的关联特征。池化层后需连接Dropout层,以减小参数的冗余度,防止模型过拟合。全连接层设置4层,用于学习关联特征的非线性;时序特征提取模块由GRU层和全连接层组成。GRU层设置2层,全连接层结构与参数特征卷积模块相同;特征串联预测模块由串联层和全连接层组成。串联层设置为1层,将输入特征进行融合,全连接层设置为4层。此外,混合算法中涉及的超参数还包括各模块网络的超参数,如各模块输入数据的维度和各层的尺寸、数量及激活函数等,模型训练与优化的超参数,如学习率和回合数等。
3. 工程案例分析
本节基于长沙地铁四号线六沟泷—望月湖区间施工实测数据,分析土舱压力空间分布物理特征函数的可靠性和CNN-GRU混合算法框架的有效性。
3.1 工程概况与数据采集
该区间位于湘江以西,全长1164 m,如图 3所示。施工采用土压平衡盾构机,获取的相关数据包括施工参数和地质参数。
施工参数包括盾构姿态参数、液压油缸参数、螺旋输送机参数、刀盘参数、渣土改性参数、土舱压力参数等162项参数,如图 4所示。这些参数均由装备自身传感器采集,采集频率为1 Hz。其中土舱压力传感器共计6个,布置在不同空间位置,可反映土舱压力空间分布特征。受限于装备自身传感器设置,部分影响土舱压力空间分布特征的因素缺少直接相关的数据记录,可通过已有实测数据侧面反映,如刀盘旋转方向通过装备侧滚数据反映。
地质参数包括隧道埋深、地下水位、地层物理力学参数、掌子面前方静止土压力等。隧道埋深取设计埋深,地下水位和地层物理力学参数取地勘报告数据。其中黏土、杂填土以及砂土性质以标准贯入次数表征,圆砾和卵石等以动力触探次数表征,岩石则采用单轴抗压强度度量。为考虑各土层深度、厚度影响,物理力学参数均采用修正值[34]。掌子面前方静止土压力由地勘报告数据计算。
3.2 数据库构建
盾构数据库中施工参数由传感器实测所得,数据繁杂且易受偶然因素影响。因此,需对数据进行预处理,包括停机数据剔除、离群值筛选、数据降噪处理等步骤。其中,停机数据剔除是以盾构机推进速度、总推进力、贯入度、刀盘转速或刀盘扭矩中某一项为0为标准,判定盾构机处于停机阶段,并对此阶段数据进行剔除。离群值的筛选旨在去除异常数据,可利用箱型图实现异常数据的检测。降噪处理采用快速傅里叶变换(FFT)将数据从时域转换到频域后通过截断高频信号实现。此外,为避免施工参数输入维度过高,通过相关系数矩阵筛选与土舱压力相关性较高的施工参数作为输入,降低模型训练时间,提高模型泛化性能。预处理后部分关键施工参数的时间序列实测数据如图 5所示。
针对施工参数中的土舱压力,还需根据物理特征函数式(1)进行降维处理。由于各传感器布置位置的极径相近,因此物理特征函数不考虑g(r)的影响。通过最小二乘法得到每分钟土舱压力空间分布物理特征函数的特征系数,由此计算得到的土舱压力与实测土舱压力对比结果如图 6所示。结果表明,平均决定系数R2达到0.99,验证了该特征函数的可靠性。
施工参数与地质参数阈值和量纲各不相同,经上述步骤处理后的数据还需进行归一化,以加快算法收敛速度,其公式如下:
x∗i=xi−xminxmax−xmin。 (2) 式中:x∗i为归一化后的第i个数据;xmin为数据的最小值;xmax为数据的最大值。
最终,归一化后的施工参数和地质参数按照每分钟数据对应构成算法输入参数的数据库。输入参数的原始统计特征如表 1所示。
表 1 输入参数统计特征表Table 1. Statistical characteristics of input parameters参数类别 特征名称 平均值 最小值 最大值 标准差 单位 施工参数 土舱压力1 0.77 0.41 1.44 0.20 bar 土舱压力2 0.83 0.47 1.47 0.18 bar 土舱压力3 1.02 0.55 1.56 0.18 bar 土舱压力4 0.65 0.33 1.11 0.14 bar 土舱压力5 1.74 1.17 2.47 0.27 bar 土舱压力6 1.50 1.03 1.96 0.19 bar 均值项(a) 1.11 0.72 1.56 0.18 bar 上下梯度项(b) -0.56 -0.90 -0.26 0.09 bar 左右梯度项(c) 0.17 0.07 0.30 0.04 bar 局部异质项(d) 0.24 0.12 0.45 0.07 bar 装备侧滚 35.09 -65.77 103.16 30.23 mm 装备倾角 -0.08 -1.15 2.02 0.88 ° 刀盘转速 1.17 0.43 1.45 0.12 r/min A组油缸推进压力 82.20 33.08 149.59 15.61 MPa B组油缸推进压力 95.03 45.38 158.28 17.95 MPa C组油缸推进压力 115.01 56.61 167.86 17.91 MPa D组油缸推进压力 96.62 48.43 165.72 18.64 MPa 推进速度 31.27 8.99 65.03 8.12 mm/min 贯入度 25.06 7.12 52.92 6.73 mm/r 总推进力 8.33 2.92 12.89 1.84 MN 螺旋机转速 5.20 -0.03 13.88 1.97 r/min 螺旋机上卸料门开度 373.44 112.20 638.49 91.57 mm 螺旋机下卸料门开度 655.86 286.55 738.57 48.93 mm 膨润土流量1 70.11 20.03 161.32 28.52 mm3 膨润土流量2 49.84 11.57 142.68 24.47 mm3 砂浆注入口压力 7.50 2.64 16.33 2.78 MPa 泡沫进水管压力 3.11 0.90 8.93 1.16 MPa 泡沫枪液体流量1 6.13 0.71 15.57 3.46 mm3 泡沫枪液体流量2 7.14 1.81 14.93 2.70 mm3 泡沫枪空气流量1 129.45 18.39 554.74 76.95 mm3 泡沫枪空气流量2 227.44 -0.67 1133.98 114.54 mm3 泡沫枪压力1 1.34 0.30 5.17 0.58 MPa 泡沫枪压力2 1.11 0.54 1.56 0.17 MPa 泡沫枪压力3 1.54 0.66 2.45 0.42 MPa 泡沫枪压力4 1.75 0.82 2.41 0.29 MPa 泡沫枪压力5 0.92 0.48 2.16 0.36 MPa 地质参数 隧道埋深 21.71 11.25 31.65 5.72 m 地下水位 11.44 0.00 25.45 7.83 m 修正标准贯入次数 2.10 0.00 9.92 1.96 — 修正动力触探次数 0.30 0.00 1.99 0.45 — 修正单轴抗压强度 14.22 0.05 39.37 11.59 kPa 静止土压力 275.62 129.53 409.90 73.56 kPa 3.3 模型训练样本定义
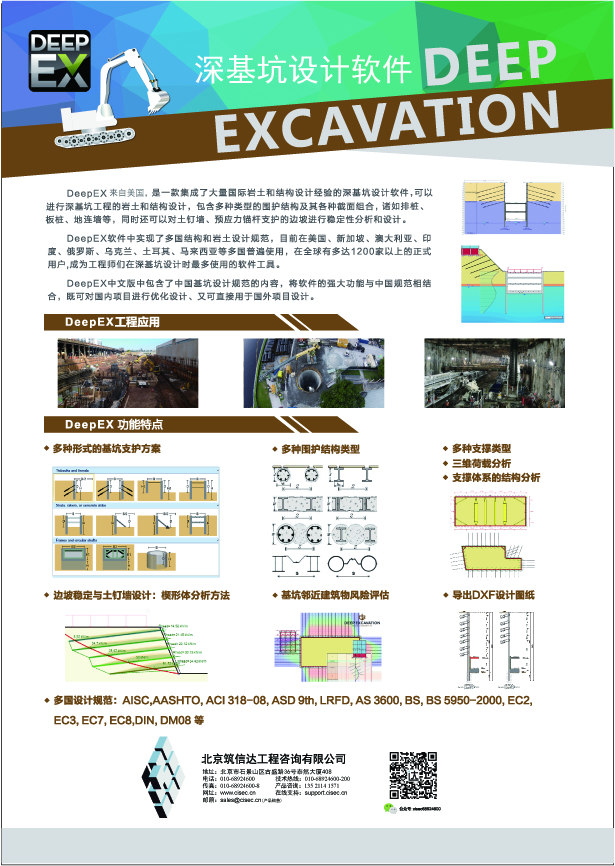
为确定混合算法的输入样本,需定义不同模块输入样本的维度及组成。为此,对土舱压力空间分布特征系数在时间尺度的自相关性进行分析,如图 7所示。
![]() 图 7 空间分布特征系数自相关分析Figure 7. Autocorrelation analysis of spatial distribution feature coefficient
图 7 空间分布特征系数自相关分析Figure 7. Autocorrelation analysis of spatial distribution feature coefficient由图 7可见9 min内各特征系数自相关性显著。因此,各模块输入样本均取9 min内数据,其中参数特征卷积模块输入为8×32的矩阵,即当前时刻之前8 min的施工参数和地质参数;时序特征提取模块输入为8×4的矩阵,即当前时刻之前8 min的土舱压力特征系数;特征串联预测模块输入为1×40的矩阵,其中32个当前时刻的施工参数和地质参数表示实时信息,4个参数特征卷积模块输出的特征值表示多源参数历史信息的空间特征,4个时序特征提取模块输出的特征值表示土舱压力特征系数的时序特征。特征串联预测模块的输出为1×4矩阵,对应标签即为当前时刻的土舱压力特征系数。
3.4 超参数选取与训练
混合算法的超参数选取如下:参数特征卷积模块中卷积层的卷积核大小为2×2,池化层大小为2;时序特征提取模块中GRU层设置64;所有模块全连接层神经元数量均设置为128,64,32,4;各模块激活函数大都使用ReLu函数,仅各全连接层中的最后一层采用Linear函数。
模型训练的评价指标采用绝对误差(MAE)、均方误差(MSE)、均方根误差(RMSE)、决定系数(R2),前三者值越小表示模型预测误差越小,R2值越大表示模型拟合优度越高,计算公式分别为
MAE=1nn∑i=1|ˆyi−yi|, (3) MSE=1nn∑i=1(ˆyi−yi)2, (4) RMSE=√1nn∑i=1(ˆyi−yi)2, (5) R2=1−n∑i=1(yi−ˆyi)2n∑i=1(yi−ˉy)2。 (6) 式中:n为样本总数;ˆyi为第i个样本的模型预测值;yi为第i个样本的真实值;ˉy为样本真实值的平均值。
模型训练时基于前述数据库将数据按4∶1的比例使用留出法划分为训练集和测试集。训练集为第663环之前的环号时序数据,测试集为第663环之后的环号时序数据。训练过程设置学习率衰减和早停,在训练集中抽取2%的数据作为模型训练的验证集,以验证集的误差(MSE)为指标,当连续4个回合模型的验证集损失无变化,则将学习率衰减40%,若连续20个回合模型的验证集损失均无优化则停止模型训练。
4. 结果与分析
本节以预测误差和预测精度为评价指标分析了算法混合以及物理特征函数导引对模型预测结果的影响。算法混合影响分析时,各算法均无特征函数输出模块。分析采用的模型分别为CNN模型、GRU模型和CNN-GRU模型。其中,CNN模型通过CNN-GRU算法去除时序特征提取模块训练得到,GRU模型通过CNN-GRU算法去除参数特征卷积模块训练得到,CNN-GRU模型通过CNN-GRU算法训练得到。
4.1 算法混合的影响分析
算法混合的影响分析时各算法特征串联预测模块的输出均为特征系数。表 2分别展示了CNN模型、GRU模型和CNN-GRU模型的预测误差以及预测精度的具体数据。
表 2 不同模型预测误差及精度对比Table 2. Comparison of predicted errors and accuracies between different models预测模型 特征系数 MSE RMSE MAE R2 CNN a 0.0009 0.0298 0.0221 0.9796 b 0.0011 0.0325 0.0247 0.9419 c 0.0014 0.0372 0.0282 0.9368 d 0.0009 0.0306 0.0231 0.9800 平均值 0.0011 0.0325 0.0245 0.9596 GRU a 0.0009 0.0303 0.0214 0.9791 b 0.0017 0.0407 0.0316 0.9058 c 0.0004 0.0194 0.0124 0.9832 d 0.0004 0.0205 0.0146 0.9910 平均值 0.0008 0.0277 0.0200 0.9648 CNN-GRU a 0.0005 0.0215 0.0148 0.9895 b 0.0004 0.0189 0.0124 0.9812 c 0.0002 0.0158 0.0097 0.9891 d 0.0003 0.0165 0.0113 0.9943 平均值 0.0003 0.0181 0.0121 0.9885 结果表明,CNN-GRU混合模型预测各特征系数的误差平均值最小且精度平均值最大,其MSE为0.0003,RMSE为0.0181,MAE为0.0121,R2为0.9885。
4.2 特征函数导引的影响分析
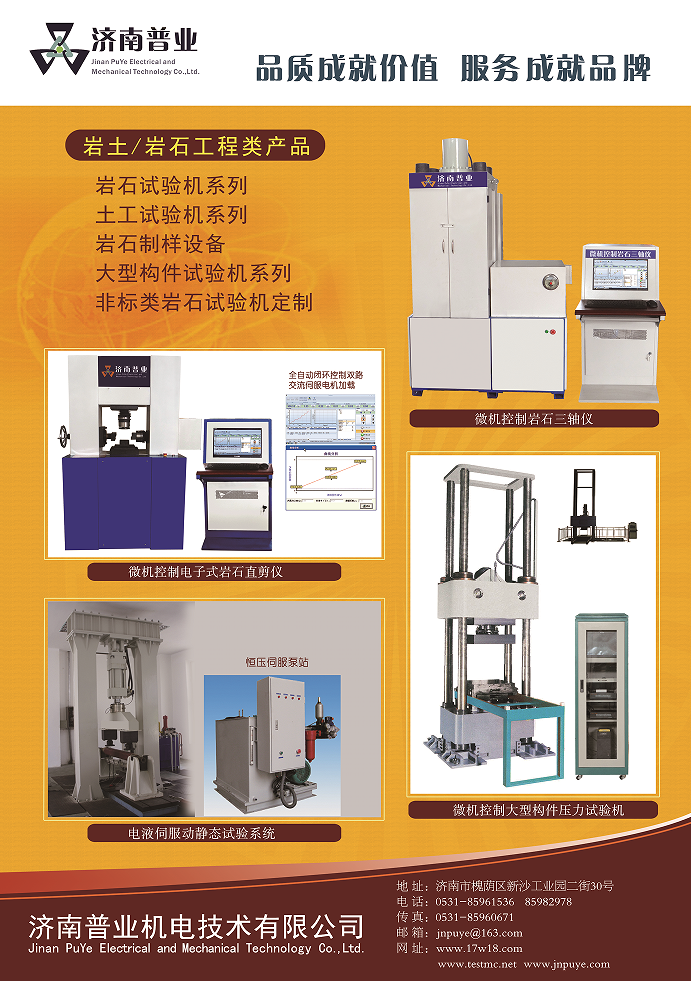
为验证特征函数导引预测土舱压力空间分布方法的可靠性,根据特征系数的预测结果,通过特征函数输出模块将其转化为各土舱压力传感器位置处的土舱压力值。图 8展示了第666环、第691环、第701环和第770环中各土舱压力预测值与实测值的时序对比结果。
![]() 图 8 预测与实测土舱压力对比图Figure 8. Comparison between predicted and measured chamber pressures
图 8 预测与实测土舱压力对比图Figure 8. Comparison between predicted and measured chamber pressures为更直观地表明物理特征函数的影响,将物理特征函数导引方法和数据驱动直接预测方法的预测误差和预测精度对比结果列于表 3。其中,数据驱动直接预测方法基于CNN-GRU模型,其GRU算法的输入为土舱压力,模型输出也为土舱压力。结果表明,数据驱动模型直接预测土舱压力的MSE、RMSE、MAE、R2平均值分别为0.00083,0.02833,0.02139,0.97651,而通过特征函数导引方法预测的土舱压力的MSE、RMSE、MAE、R2平均值分别为0.00076,0.02502,0.02107,0.97665,整体而言后者的预测误差减小,模型预测精度有所提升。
表 3 特征函数导引方法与数据驱动方法预测结果对比Table 3. Comparison of predicted results between feature function-guided method and data-driven method预测方法 评价指标 土舱压力1 土舱压力2 土舱压力3 土舱压力4 土舱压力5 土舱压力6 平均值 特征函数导引预测土舱压力 R2 0.99886 0.95357 0.94713 0.98468 0.99064 0.98476 0.97665 MSE 0.00005 0.00142 0.00162 0.00026 0.00067 0.00055 0.00076 RMSE 0.00674 0.03763 0.04029 0.01603 0.02596 0.02348 0.02502 MAE 0.00582 0.03249 0.03568 0.01288 0.02113 0.01841 0.02107 数据驱动直接预测土舱压力 R2 0.97509 0.98680 0.98347 0.96658 0.97444 0.97267 0.97651 MSE 0.00086 0.00046 0.00062 0.00148 0.00073 0.00082 0.00083 RMSE 0.02941 0.02149 0.02498 0.03853 0.02693 0.02867 0.02833 MAE 0.02251 0.01614 0.01829 0.02783 0.02107 0.02249 0.02139 4.3 参数敏感性分析
针对工程穿越的不同地层,基于特征函数导引的CNN-GRU模型对土舱压力空间分布特征系数进行敏感性分析,并探讨地层地质条件变化对特征系数敏感参数的影响。参数敏感性分析基于Sobol方法[35]实现,其主要结果如下。
除均值项外,其余特征系数在不同地层的主要敏感参数均一致。上下梯度项的主要敏感参数为隧道埋深、螺旋机转速和泡沫进水管压力;左右梯度项的主要敏感参数为贯入度、A组油缸推进压力和装备侧滚;局部异质项的主要敏感参数为修正标准贯入次数、隧道埋深和地下水位。而对于均值项,当盾构机处于强风化板岩层时,其主要敏感参数为修正动力触探次数、泡沫枪液体流量和隧道埋深;当盾构机处于中风化板岩层时,其主要敏感参数为隧道埋深、泡沫枪液体流量和螺旋机转速;当盾构机处于微风化板岩层时,其主要敏感参数为隧道埋深、泡沫枪液体流量和泡沫进水管压力。
随着地层地质条件的变化,各特征系数对主要敏感参数的敏感程度均会发生变化。其中均值项受地层地质条件变化影响最显著。微风化板岩层与强风化板岩层相比,均值项对螺旋机转速的敏感度降低了26%,且其最敏感参数由泡沫进水管压力变为泡沫枪液体流量。而上下梯度项、左右梯度项和局部异质项的最敏感参数均未改变,仅各敏感参数的敏感度发生变化。相较于微风化板岩层,中风化板岩层中上下梯度项对螺旋机钻速的敏感度降低了21%,左右梯度项对贯入度的敏感度增加了10%,局部异质项对隧道埋深的敏感度降低了27%。
5. 结论
本文提出了基于空间分布物理特征函数导引深度学习的盾构机土舱压力场预测方法,并以实际工程案例验证了所提方法的可行性,得到以下4点结论。
(1)土舱压力的空间分布特征可被解耦为4个部分:均值项、上下梯度项、左右梯度项及局部异质项。土舱压力空间分布特征可基于土舱压力传感器的布置位置通过特征函数描述,决定系数R2达到0.99。
(2)基于物理特征函数导引的CNN-GRU混合模型预测特征系数的R2平均值高达0.9885。物理特征函数的引入,充分发挥了混合模型中各算法模块的优势,可全面提取土舱压力分布的时空特征。
(3)不同地层中土舱压力空间分布特征系数的主要敏感参数基本一致,左右梯度项受施工参数影响显著,局部异质项受地质参数影响显著,均值项与上下梯度项则同时受地质参数与施工参数影响。
(4)地层地质条件变化会改变各特征系数主要敏感参数的敏感度。其中均值项受其影响最显著,其次为上下梯度项和局部异质项,左右梯度项最小,各主要敏感参数敏感度随地层地质条件的变化规律可为复杂地层盾构机土舱压力精细化调控提供参考。
-
![]()
图 1 物理特征函数三维示意图
Figure 1. Three-dimensional schematic diagram of physical feature function
![]()
图 7 空间分布特征系数自相关分析
Figure 7. Autocorrelation analysis of spatial distribution feature coefficient
![]()
图 8 预测与实测土舱压力对比图
Figure 8. Comparison between predicted and measured chamber pressures
表 1 输入参数统计特征表
Table 1 Statistical characteristics of input parameters
参数类别 特征名称 平均值 最小值 最大值 标准差 单位 施工参数 土舱压力1 0.77 0.41 1.44 0.20 bar 土舱压力2 0.83 0.47 1.47 0.18 bar 土舱压力3 1.02 0.55 1.56 0.18 bar 土舱压力4 0.65 0.33 1.11 0.14 bar 土舱压力5 1.74 1.17 2.47 0.27 bar 土舱压力6 1.50 1.03 1.96 0.19 bar 均值项(a) 1.11 0.72 1.56 0.18 bar 上下梯度项(b) -0.56 -0.90 -0.26 0.09 bar 左右梯度项(c) 0.17 0.07 0.30 0.04 bar 局部异质项(d) 0.24 0.12 0.45 0.07 bar 装备侧滚 35.09 -65.77 103.16 30.23 mm 装备倾角 -0.08 -1.15 2.02 0.88 ° 刀盘转速 1.17 0.43 1.45 0.12 r/min A组油缸推进压力 82.20 33.08 149.59 15.61 MPa B组油缸推进压力 95.03 45.38 158.28 17.95 MPa C组油缸推进压力 115.01 56.61 167.86 17.91 MPa D组油缸推进压力 96.62 48.43 165.72 18.64 MPa 推进速度 31.27 8.99 65.03 8.12 mm/min 贯入度 25.06 7.12 52.92 6.73 mm/r 总推进力 8.33 2.92 12.89 1.84 MN 螺旋机转速 5.20 -0.03 13.88 1.97 r/min 螺旋机上卸料门开度 373.44 112.20 638.49 91.57 mm 螺旋机下卸料门开度 655.86 286.55 738.57 48.93 mm 膨润土流量1 70.11 20.03 161.32 28.52 mm3 膨润土流量2 49.84 11.57 142.68 24.47 mm3 砂浆注入口压力 7.50 2.64 16.33 2.78 MPa 泡沫进水管压力 3.11 0.90 8.93 1.16 MPa 泡沫枪液体流量1 6.13 0.71 15.57 3.46 mm3 泡沫枪液体流量2 7.14 1.81 14.93 2.70 mm3 泡沫枪空气流量1 129.45 18.39 554.74 76.95 mm3 泡沫枪空气流量2 227.44 -0.67 1133.98 114.54 mm3 泡沫枪压力1 1.34 0.30 5.17 0.58 MPa 泡沫枪压力2 1.11 0.54 1.56 0.17 MPa 泡沫枪压力3 1.54 0.66 2.45 0.42 MPa 泡沫枪压力4 1.75 0.82 2.41 0.29 MPa 泡沫枪压力5 0.92 0.48 2.16 0.36 MPa 地质参数 隧道埋深 21.71 11.25 31.65 5.72 m 地下水位 11.44 0.00 25.45 7.83 m 修正标准贯入次数 2.10 0.00 9.92 1.96 — 修正动力触探次数 0.30 0.00 1.99 0.45 — 修正单轴抗压强度 14.22 0.05 39.37 11.59 kPa 静止土压力 275.62 129.53 409.90 73.56 kPa  下载: 导出CSV
下载: 导出CSV
表 2 不同模型预测误差及精度对比
Table 2 Comparison of predicted errors and accuracies between different models
预测模型 特征系数 MSE RMSE MAE R2 CNN a 0.0009 0.0298 0.0221 0.9796 b 0.0011 0.0325 0.0247 0.9419 c 0.0014 0.0372 0.0282 0.9368 d 0.0009 0.0306 0.0231 0.9800 平均值 0.0011 0.0325 0.0245 0.9596 GRU a 0.0009 0.0303 0.0214 0.9791 b 0.0017 0.0407 0.0316 0.9058 c 0.0004 0.0194 0.0124 0.9832 d 0.0004 0.0205 0.0146 0.9910 平均值 0.0008 0.0277 0.0200 0.9648 CNN-GRU a 0.0005 0.0215 0.0148 0.9895 b 0.0004 0.0189 0.0124 0.9812 c 0.0002 0.0158 0.0097 0.9891 d 0.0003 0.0165 0.0113 0.9943 平均值 0.0003 0.0181 0.0121 0.9885
下载: 导出CSV
表 3 特征函数导引方法与数据驱动方法预测结果对比
Table 3 Comparison of predicted results between feature function-guided method and data-driven method
预测方法 评价指标 土舱压力1 土舱压力2 土舱压力3 土舱压力4 土舱压力5 土舱压力6 平均值 特征函数导引预测土舱压力 R2 0.99886 0.95357 0.94713 0.98468 0.99064 0.98476 0.97665 MSE 0.00005 0.00142 0.00162 0.00026 0.00067 0.00055 0.00076 RMSE 0.00674 0.03763 0.04029 0.01603 0.02596 0.02348 0.02502 MAE 0.00582 0.03249 0.03568 0.01288 0.02113 0.01841 0.02107 数据驱动直接预测土舱压力 R2 0.97509 0.98680 0.98347 0.96658 0.97444 0.97267 0.97651 MSE 0.00086 0.00046 0.00062 0.00148 0.00073 0.00082 0.00083 RMSE 0.02941 0.02149 0.02498 0.03853 0.02693 0.02867 0.02833 MAE 0.02251 0.01614 0.01829 0.02783 0.02107 0.02249 0.02139
下载: 导出CSV
-
[1] 中国城市轨道交通协会. 城市轨道交通2021年度统计和分析报告[R]. 北京: 中国城市轨道交通协会, 2022. China Association of Metros. Urban Rail Transit Statistics and Analytical Report in 2021[R]. Beijing: China Association of Metros, 2022. (in Chinese)
[2] 郑刚, 崔涛, 程雪松, 等. 某地铁区间盾构法施工隧道事故实例与分析[J]. 岩土工程学报, 2017, 39(增刊2): 132-135. doi: 10.11779/CJGE2017S2033 ZHENG Gang, CUI Tao, CHENG Xuesong, et al. Introduction and analysis of an accident in a shield tunnel[J]. Chinese Journal of Geotechnical Engineering, 2017, 39(S2): 132-135. (in Chinese) doi: 10.11779/CJGE2017S2033
[3] 陈辉华, 李瑚均, 户晓栋. 地铁盾构掘进安全影响因素及事故致因模型[J]. 铁道工程学报, 2020, 37(5): 87-92. doi: 10.3969/j.issn.1006-2106.2020.05.016 CHEN Huihua, LI Hujun, HU Xiaodong. Safety influential factors and accident causation model of subway shield construction[J]. Journal of Railway Engineering Society, 2020, 37(5): 87-92. (in Chinese) doi: 10.3969/j.issn.1006-2106.2020.05.016
[4] 侯永茂, 杨国祥, 葛修润, 等. 土压平衡盾构土舱压力建立机制及设定准则研究[J]. 岩石力学与工程学报, 2012, 31(3): 625-631. doi: 10.3969/j.issn.1000-6915.2012.03.022 HOU Yongmao, YANG Guoxiang, GE Xiurun, et al. Study of established mechanism and setting standard of chamber earth pressure for earth pressure balance shield[J]. Chinese Journal of Rock Mechanics and Engineering, 2012, 31(3): 625-631. (in Chinese) doi: 10.3969/j.issn.1000-6915.2012.03.022
[5] HU X Y, HE C A, WALTON G, et al. Face stability analysis of EPB shield tunnels in dry granular soils considering nonuniform chamber pressure and a dynamic excavation process[J]. International Journal of Geomechanics, 2021, 21(6): 04021074. doi: 10.1061/(ASCE)GM.1943-5622.0002032
[6] 朱合华, 徐前卫, 廖少明, 等. 土压平衡盾构法施工参数的模型试验研究[J]. 岩土工程学报, 2006, 28(5): 553-557. doi: 10.3321/j.issn:1000-4548.2006.05.002 ZHU Hehua, XU Qianwei, LIAO Shaoming, et al. Experimental study on working parameters of EPB shield machine[J]. Chinese Journal of Geotechnical Engineering, 2006, 28(5): 553-557. (in Chinese) doi: 10.3321/j.issn:1000-4548.2006.05.002
[7] 王洪新, 傅德明. 土压平衡盾构掘进的数学物理模型及各参数间关系研究[J]. 土木工程学报, 2006, 39(9): 86-90. doi: 10.3321/j.issn:1000-131X.2006.09.014 WANG Hongxin, FU Deming. A mathematical model and the related parameters for EPB shield tunneling[J]. China Civil Engineering Journal, 2006, 39(9): 86-90. (in Chinese) doi: 10.3321/j.issn:1000-131X.2006.09.014
[8] ACUN S N, BILGIN N, ERBOYLU U. Contribution on the understanding of EPB-TBM drives in complex geologic structures[J]. Tunnelling and Underground Space Technology, 2021, 107: 103646. doi: 10.1016/j.tust.2020.103646
[9] 侯永茂, 杨国祥, 葛修润, 等. 超大直径土压平衡盾构土舱压力和开挖面水土压力分布特性研究[J]. 岩土力学, 2012, 33(9): 2713-2718. HOU Yongmao, YANG Guoxiang, GE Xiurun, et al. Study of distribution properties of water and earth pressure at excavation face and in chamber of earth pressure balance shield with super-large diameter[J]. Rock and Soil Mechanics, 2012, 33(9): 2713-2718. (in Chinese)
[10] WANG S Y, QU T M, FANG Y, et al. Stress responses associated with earth pressure balance shield tunneling in dry granular ground using the discrete-element method[J]. International Journal of Geomechanics, 2019, 19(7): 04019060. doi: 10.1061/(ASCE)GM.1943-5622.0001434
[11] 邵诚俊, 李修亮, 苏宏业. 基于多系统协调的密封舱压力智能化控制[J]. 机械工程学报, 2014, 50(21)105-110. SHAO Chengjun, LI Xiuliang, SU Hongye. Intelligent control for earth pressure in chamber of earth pressure balance shield machine based on multi-system coordination[J]. Journal of Mechanical Engineering, 2014, 50(21): 105-110. (in Chinese)
[12] DANG T S, MESCHKE G. Influence of muck properties and chamber design on pressure distribution in EPB pressure chambers: insights from computational flow simulations[J]. Tunnelling and Underground Space Technology, 2020, 99: 103333. doi: 10.1016/j.tust.2020.103333
[13] YE X Y, WANG S Y, YANG J S, et al. Soil conditioning for EPB shield tunneling in argillaceous siltstone with high content of clay minerals: case study[J]. International Journal of Geomechanics, 2017, 17(4): 0516002.
[14] 王树英, 刘朋飞, 胡钦鑫, 等. 盾构隧道渣土改良理论与技术研究综述[J]. 中国公路学报, 2020, 33(5): 8-34. doi: 10.3969/j.issn.1001-7372.2020.05.002 WANG Shuying, LIU Pengfei, HU Qinxin, et al. State-of-the-art on theories and technologies of soil conditioning for shield tunneling[J]. China Journal of Highway and Transport, 2020, 33(5): 8-34. (in Chinese) doi: 10.3969/j.issn.1001-7372.2020.05.002
[15] CHENG Z L, ZHOU W H, GARG A. Genetic programming model for estimating soil suction in shallow soil layers in the vicinity of a tree[J]. Engineering Geology, 2020, 268: 105506. doi: 10.1016/j.enggeo.2020.105506
[16] ZHANG P, YIN Z Y, JIN Y F, et al. A novel hybrid surrogate intelligent model for creep index prediction based on particle swarm optimization and random forest[J]. Engineering Geology, 2020, 265: 105328. doi: 10.1016/j.enggeo.2019.105328
[17] 罗维平, 袁大军, 金大龙, 等. 基于随机森林的复合地层盾构切口泥水压力预测与分析[J]. 土木工程学报, 2020, 53(增刊1): 43-49. LUO Weiping, YUAN Dajun, JIN Daling, et al. Prediction and analysis of slurry pressure at the shield cut in composite strata based on random forest[J]. China Civil Engineering Journal, 2020, 53(S1): 43-49. (in Chinese)
[18] 黄靓钰, 阳军生, 张聪, 等. 基于BP神经网络的水下岩溶地层盾构掘进参数预测与分析[J]. 土木工程学报, 2020, 53(增刊1): 75-80+98. HUANG Liangyu, YANG Junsheng, ZHANG Cong, et al. Prediction and analysis of shield tunneling parameters in underwater karst stratum based on BP neural network[J]. China Civil Engineering Journal, 2020, 53(S1): 75-80+98. (in Chinese)
[19] 李洛宾, 龚晓南, 甘晓露, 等. 基于循环神经网络的盾构隧道引发地面最大沉降预测[J]. 土木工程学报, 2020, 53(增刊1): 13-19. LI Luobin, GONG Xiaonan, GAN Xiaolu, et al. Prediction of maximum ground settlement induced by shield tunneling based on recurrent neural network[J]. China Civil Engineering Journal, 2020, 53(S1): 13-19. (in Chinese)
[20] YEH I C. Application of neural networks to automatic soil pressure balance control for shield tunneling[J]. Automation in Construction, 1997, 5(5): 421-426. doi: 10.1016/S0926-5805(96)00165-3
[21] LIU X Y, SHAO C, MA H F, et al. Optimal earth pressure balance control for shield tunneling based on LS-SVM and PSO[J]. Automation in Construction, 2011, 20(4): 321-327. doi: 10.1016/j.autcon.2010.11.002
[22] SHAO C, LAN D S. Optimal control of an earth pressure balance shield with tunnel face stability[J]. Automation in Construction, 2014, 46: 22-29. doi: 10.1016/j.autcon.2014.07.005
[23] 刘宣宇, 张凯举, 邵诚. 基于数据驱动的盾构机密封舱土压预测[J]. 煤炭学报, 2019, 44(9): 2898-2904. LIU Xuanyu, ZHANG Kaiju, SHAO Cheng. Earth pressure prediction in soil chamber of shield machine based on data-driven[J]. Journal of China Coal Society, 2019, 44(9): 2898-2904. (in Chinese)
[24] GAO M Y, ZHANG N, SHEN S L, et al. Real-time dynamic earth-pressure regulation model for shield tunneling by integrating GRU deep learning method with GA optimization[J]. IEEE Access, 2020, 8: 64310-64323. doi: 10.1109/ACCESS.2020.2984515
[25] MOSAVAT K. Examination of excavation chamber pressure on a 17.5 m diameter earth pressure balance tunnel boring machine[D]. Colorado School of Mines, 2015
[26] BEZUIJEN A, TALMON A. Soil pressures at the cutting wheel and the pressure bulkhead of an EPB-shield[M]// Geotechnical Aspects of Underground Construction in Soft Ground. London: CRC Press, 2014: 523-529.
[27] 赫晓慧, 罗浩田, 乔梦佳, 等. 基于CNN-RNN网络的中国冬小麦估产[J]. 农业工程学报, 2021, 37(17): 124-132. doi: 10.11975/j.issn.1002-6819.2021.17.014 HE Xiaohui, LUO Haotian, QIAO Mengjia, et al. Yield estimation of winter wheat in China based on CNN-RNN network[J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(17): 124-132. (in Chinese) doi: 10.11975/j.issn.1002-6819.2021.17.014
[28] YU J X, ZHANG X, XU L L, et al. A hybrid CNN-GRU model for predicting soil moisture in maize root zone[J]. Agricultural Water Management, 2021, 245: 106649. doi: 10.1016/j.agwat.2020.106649
[29] 姚程文, 杨苹, 刘泽健. 基于CNN-GRU混合神经网络的负荷预测方法[J]. 电网技术, 2020, 44(9): 3416-3423. YAO Chengwen, YANG Ping, LIU Zejian. Load forecasting method based on CNN-GRU hybrid neural network[J]. Power System Technology, 2020, 44(9): 3416-3423. (in Chinese)
[30] XIAO M, YANG B, WANG S L, et al. A feature fusion enhanced multiscale CNN with attention mechanism for spot-welding surface appearance recognition[J]. Computers in Industry, 2022, 135: 103583. doi: 10.1016/j.compind.2021.103583
[31] YANG S L, CHONG X. Study on feature extraction technology of real-time video acquisition based on deep CNN[J]. Multimedia Tools and Applications, 2021, 80(25): 33937-33950. doi: 10.1007/s11042-021-11417-7
[32] LIU Y, PU H B, SUN D W. Efficient extraction of deep image features using convolutional neural network (CNN) for applications in detecting and analysing complex food matrices[J]. Trends in Food Science & Technology, 2021, 113: 193-204.
[33] CHO K, VAN MERRIENBOER B, BAHDANAU D, et al. On the properties of neural machine translation: encoder–decoder approaches[C]// Proceedings of SSST-8, Eighth Workshop on Syntax, Semantics and Structure in Statistical Translation. Doha: Association for Computational Linguistics, 2014: 103-111.
[34] CHEN R P, ZHANG P, KANG X, et al. Prediction of maximum surface settlement caused by earth pressure balance (EPB) shield tunneling with ANN methods[J]. Soils and Foundations, 2019, 59(2): 284-295. doi: 10.1016/j.sandf.2018.11.005
[35] SOBOL I M. Sensitivity analysis for non-linear mathematical models[J]. Mathematical Modelling and Computational Experiment, 1993(1): 407-414.
-
期刊类型引用(1)
1. 雒伟勃,李龙,汪来,孙佳利,潘秋景. 基于残差神经网络的盾构土舱压力预测. 隧道建设(中英文). 2024(11): 2171-2180 .  百度学术
百度学术
其他类型引用(0)
-
其他相关附件








计量
- 文章访问数: 508
- HTML全文浏览量: 40
- PDF下载量: 179
- 被引次数: 1