Research advances in bio-inspired geotechnics
-
摘要: 岩土体中生存的生物使用独特的生物机制与岩土体相互作用,以完成土中运动、生长、锚固和吸收养分等功能。这些生物机制可被岩土工程借鉴和利用。仿生岩土是从形态、行为和原理上研究生物机制,将其用于发展岩土工程理论、技术和装备,用来解决岩土工程问题的新方向。近年来,仿生岩土技术逐渐成为了岩土工程界的一个引人注意的课题,并取得了一些进展。首先,介绍了仿生岩土技术的设计思路和过程以及主要研究方法。然后,总结并分析了不同生物机制在土中贯入与掘进、土与结构相互作用接触面和土中锚固系统等方面的研究现状和进展,其中典型的生物机制包括生物土中运动、蛇腹鳞摩擦各向异性和树木根系结构等。最后探讨了仿生岩土技术所面临的挑战和未来展望。Abstract: Many biological organisms use morphologically, behaviourally and schematically the unique strategies to interact with soils and rocks, and perform functions such as moving in soils, growing in soils, anchoring, and assimilating nutriment. For the bio-inspired geotechnics, these biological strategies are investigated and used to develop new theories and technologies in geotechnical engineering. In recent years, the bio-inspired geotechnics have gradually become an interesting topic in the geotechnical research community. The research methodologies and tools for the bio-inspired geotechnics are introduced. The research advances in different biological strategies and their potential application fields are introduced and analyzed, such as exactions and penetrations of biological organisms in soils, friction behaviour between soils and biological organisms, and biological anchorage mechanisms, etc. The opportunities and challenges in the bio-inspired geotechnics are also discussed.
-
0. 引言
岩土体的表面和内部存在大量的动物、植物和微生物,如昆虫、软体动物、鱼类、细菌、真菌和植物根系等。这些生物体利用各类独特的生物机制适应岩土介质环境并与之相互作用,影响土体结构和性质,并完成土中运动、生长、锚固和吸收养分等功能[1]。
近年来,生物与岩土体的相互作用过程得到了岩土工程研究者的重视。其中,大量的研究集中在直接利用生物有机体或生物反应过程、产物改善岩土体性质和工程性能,即生物激发岩土技术,如利用细菌或生物酶催化诱导生成碳酸钙加固岩土体[2]及利用植被加固边坡或减少土壤侵蚀[3]等。另有部分研究发现,生物与岩土体的相互作用过程和岩土工程系统具有一定的相似性,例如在松散土体中的运动[4]、海洋沉积物中挖掘和钻孔[5-6]、软弱岩土材料中锚固[7]和控制物质及能源的输送[8]等,这些相互作用过程所使用的生物机制可启发新的岩土工程技术和装备。仿生技术已经广泛应用于机械制造和计算机科学等领域[1, 9]。然而,仿生技术在岩土工程领域起步较晚,其在岩土工程领域的应用可以开拓发展新的岩土工程理论,并借此开发高效、可靠和低能耗的技术以解决工程问题。
生物机制已被一些学者加以研究并用于开发土中贯入和锚固系统等方面的新技术和设备[1, 10]。相关研究不同于生物激发岩土技术的直接利用生物体或生物与岩土体的相互作用过程,而是借鉴生物实现土中运动或锚固的方式和基本原理,开发新的土中贯入或锚固设备。文中将这一研究生物机制基本原理并借此开发岩土工程新技术和设备,来解决岩土工程问题的过程,称为仿生岩土技术。作为一项新兴的技术,仿生岩土技术在近些年里得到了较多的关注和研究,积累了一些文献资料,本文对这些研究成果进行了介绍和分析。首先,介绍了仿生岩土技术的设计思路和过程以及主要研究方法。其次,介绍生物机制在土中贯入与掘进过程、土与结构相互作用接触面和土中锚固系统等方面的研究进展,重点介绍了借鉴生物体在土中运动机制的土中贯入与掘进过程研究。最后分析了仿生岩土技术研究和发展中的一些实际问题,并对未来前景和发展方向提出展望,以期为仿生岩土技术的进一步研究提供参考。
1. 仿生岩土技术的设计思路和过程
1.1 设计思路和过程
仿生技术的设计思路一般分为工程问题驱动和生物机制驱动[11]。前者先识别具体工程问题,再根据工程问题搜寻可用的生物机制;后者先研究具体的生物机制,再评估该机制可应用的工程问题。结合岩土问题的工程特点,仿生岩土技术现阶段的设计思路主要为工程问题驱动。此外,土中生物的尺寸和活动深度较岩土工程系统小很多,这种差异会增大生物机制向岩土工程方法转化的难度。因此,需要仔细评估生物机制在具体工程尺度下的可行性。
对生物机制的描述和模型化可根据抽象程度分为形式、行为和原理3个层面[12]。形式层面只包含直接模仿生物体的物理结构,而不研究这些物理结构存在的原因以及如何发挥作用,如直接复制蛇腹部鳞片的形状和大小来开发仿蛇鳞表面[13]。行为层面描述生物形态及其使用过程,分析生物形态的具体功能以及该功能的实现方式,如蚯蚓蠕动主要由纵肌和环肌的交替舒张和收缩完成。原理层面主要研究生物机制的基本原理,给出生物机制实现具体功能的原因,如假设蠕动会导致土体形成张拉裂缝和剪切带,改变土体应力状态,进而降低运动阻力[14-15]。生物机制的抽象程度越高,提供的设计思想越具有普遍性,也更便于将其应用在工程尺度。需注意,3个层面并非完全独立,对生物机制的研究和类比应用需要在3个层面上综合考虑。
综上,仿生岩土技术的设计过程:首先,确定具体的岩土工程问题;接着,根据问题搜寻相似的生物与岩土体相互作用过程和可能适用的生物机制,探究这些生物机制的基本原理并提出假设模型;然后,根据假设模型开发新的技术和装备原型,并利用试验验证假设模型,同时,评估这些生物机制在工程尺度上的应用潜力;最后,利用验证成功的生物机制开发新的技术和装备,并应用于实际工程中,如用于水下、污染场地等特殊场景的勘察机器人[16-17]、摩擦各向异性桩基础[18]和仿树根锚杆系统[7]等。
1.2 主要研究方法
仿生岩土技术的主要研究方法包括试验研究和仿真模拟研究,并辅以理论分析。试验研究包括微观试验和宏观试验。微观试验研究生物表面及内部微观结构、土体与生物或仿生物体间的相互作用等,发现生物机制并研究其基本原理。具体方法有借助微观分析设备的研究,包括扫描电子显微镜(SEM)、激光共聚焦扫描显微镜(confocal laser scanning microscopy, CLSM)、原子力显微镜(atomic force microscopy, AFM)、X射线计算机断层扫描技术(CT)、核磁共振技术(NMR)、激光和白光三维扫描技术等。例如Baum等[19]使用SEM、CLSM和AFM观测了蛇腹部鳞片的微观结构,揭示了蛇腹部鳞片微观结构各向异性是宏观上摩擦力各向异性的主要原因;Borela等[16]利用CT扫描研究了仿蚯蚓探头贯入过程中的土体响应。宏观试验指生物试验、室内物理模型试验和现场试验等,用以发现或验证生物机制的具体作用和功能,并研究其岩土工程应用的可行性和有效性。仿真模拟研究的主要用途是基于合理的土体力学与关键特性模型,研究生物或仿生物体与土体间的相互作用,揭示生物机制的基本机理。具体方法包括有限单元法(FEM)[20]、离散单元法(DEM)[21]和阻力理论模型(resistive force theory, RFT)[22]等,其中以离散单元法和阻力理论模型应用最为广泛。
近年来,仿生机器人不断发展,尤其是与软体机器人相关的研究不断取得突破[23-25]。与传统的刚性机器人使用刚性材料不同,软体机器人使用的是模量处于自然生物材料模量范围内的柔性材料,具有无限多自由度和连续变形能力,能适应各种非结构化环境。软体机器人在材料、结构及多功能性上与生物体有诸多相似之处[26],可以充分发挥生物机制的优势,是实施仿生岩土技术的良好载体,在物理模型试验中得到了广泛应用。目前仿生岩土技术中研究较多的软体机器人有仿蚯蚓机器人[16, 27]、仿蛏子机器人[17, 28]和植物根系生长启发机器人[29-30]等。
2. 仿生岩土技术研究现状
2.1 土中贯入与掘进
土壤生物特别是动物往往需要在土中运动。仿生岩土技术中,研究最广泛的课题是借鉴利用生物的土中运动机制来开发新的土中贯入与掘进的技术和装备,尤其是特殊场地勘察和水下勘探等方面。与现有贯入和掘进技术中克服土体阻力以完成贯入和掘进不同,生物一般采取减小或控制阻力的策略在土中前进。下面对不同生物在土体中的运动机制及使用这些机制的新技术和装备进行介绍。
(1)生物机制
相较于在空气和水等流体介质中,生物在土体介质中的运动更为困难,运动机制也更加复杂。主要原因在于生物的运动主要依靠肢体或组织与周围介质的相互作用,而土中的运动阻力通常比流体介质中大1~2个数量级;其次,土体的垂直应力梯度使得运动需要更大的推力,同时导致生物水平运动时受到向上的升力[29]。此外,生物在土中运动还会引起土体性质和结构的不可逆变化,使得相互作用更加复杂。可用于启发改进岩土工程技术的土中运动机制有蠕动、双锚运动、颗粒流态化运动、植物根的生长、波动运动及蚂蚁挖掘筑巢等。
a)蠕动
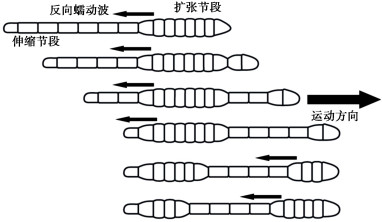
蠕动是一种广泛存在于环节动物和节肢动物的独特肌肉运动形式,在土体中蠕动的典型生物有蚯蚓和多毛纲环节蠕虫等。这类生物没有刚性骨骼,由纵肌和环肌构成多个离散封闭圆柱形腔室,腔内充满体液,形成水骨骼结构以支撑身体[23, 31]。就单个腔室而言,由于液体的不可压缩性,当肌肉在某一方向收缩时,腔室必然会在其他方向伸长,以保持体积不变[31]。蚯蚓蠕动的本质是各个节段的纵肌收缩造成腔室径向扩张和环肌收缩造成腔室轴向伸长的交替过程,见图 1。径向扩张对洞壁施加法向力,形成锚固以阻止轴向伸长时的后退,同时减小贯入阻力[1, 32]。在黏土和砂土中的阻力降低原理不同。在黏土中,径向扩张导致洞壁前端土体产生张拉裂缝进而变形软化[33];在砂土中,径向扩张压实侧向土体并导致洞壁前端土体应力松弛[15, 32]。此外,蠕动的能耗较小,直径2.5 mm的蚯蚓在土中运动的应变能仅为0.5 J/m[34]。但蠕动涉及的身体结构和运动机制较为复杂,难以制造,且运动速度较慢,同时很难用于较硬的介质。
b)双锚运动
双锚运动是花蛤和蛏子等双壳类生物在土中的运动机制。双锚意为中空肌肉足和壳的交替锚定,即当足部向前延伸时,打开外壳提供锚固力以抵消后退;接着关闭外壳,足部充液膨胀提供锚固力并将身体向前拉动的循环过程。双锚运动和蠕动都涉及了径向扩张和轴向伸长的循环,两者减小阻力的原理类似,不同之处在于两者扩张和伸长的交替时序不同,且双锚运动的径向扩张由打开外壳和堆积体液产生,更易于模仿;而蠕动的径向扩张由肌肉收缩产生,每个腔室均可扩张或伸长。研究发现幼年蛏子在砂中钻至70 cm所受的最大阻力仅为10 N,而相同形状和尺寸的铝棒在10 N的作用下仅能贯入2 cm左右[35]。该研究表明蛏子在钻孔的过程中会处理周围土体以降低阻力,这主要通过排出体液或快速剪切以降低有效应力来完成[36]。双锚运动适用的深度较浅且无法用于较硬的介质。此外,有研究发现蛏子采用往复伸缩运动的方式返回砂表面,且向上的速度和步幅大于向下的速度和步幅[17]。
c)颗粒流态化运动
颗粒流态化是生物在浅层土体中运动的有效方式之一。其主要过程是,向土中注入流体或对土体快速剪切,导致土体收缩或产生超静孔隙水压力,进而形成局部流态化破坏,降低生物土中运动阻力[15]。按生物体大小和所处深度,颗粒流态化可分为整体流态化和局部流态化,其中整体流态化常见于太平洋沙鱼和砂章鱼等体型较大的生物,而局部流态化常见于蛤蜊等小型生物[15]。随着深度的增大,土颗粒的应力增大,颗粒流态化会越来越困难,因此这一机制不适用于在土体深处运动。
d)植物根的生长
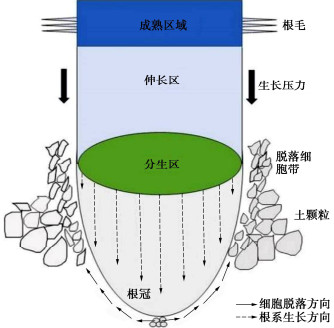
植物的根可以在黏土、砂土和岩石等岩土体中生长,生长过程示意图见图 2。从图 2中可以看出,根主要由成熟区域、伸长区、分生区、根冠和用于增大锚固力的根毛组成。根的生长由根尖生长和细胞脱落两种机制共同实现[37-38],可有效降低根的侧向摩擦阻力和根尖的土体阻力。根尖生长过程中,成熟区域径向扩张以降低根尖阻力,同时相对于土颗粒处于静止状态,接着伸长区推动分生区和根冠向前运动,并产生超过1 MPa的轴向生长压力;细胞脱落过程中,根冠顶部脱落的分生区细胞会随着根尖的生长向后运动,在根冠和土颗粒间形成细胞带,以降低根冠和分生区与土体间的摩擦力。此外,根在生长过程中还会进行振动和螺旋式运动以减小阻力[39]。植物根的生长通常是单方向的运动,且需要较长的时间,因此,该机制的灵活性较差且生长速度较慢。
e)波动运动
波动运动可利用土颗粒的流动特性产生推进力[40]。其典型特征是身体随时间周期性的摆动,即在一个周期的末时刻身体形态会回到初始状态。代表性的生物行为包括沙漠蜥蜴在浅层干砂中的水平运动[41]及比目鱼利用周期性波动在湿砂中自埋[42]等。沙漠蜥蜴的头部为下长上短的非对称楔形结构,该结构使得沙漠蜥蜴在土中水平运动时会将土体向上推动,从而产生向下的反力,来抵消土体垂直应力梯度产生的向上升力[43]。楔形结构可以用来抑制生物体或仿生掘进机器人在干燥颗粒介质中的升起[44]。波动运动的局限在于其只适用于在浅层软土中水平运动,且运动能耗较高。
f)蚂蚁挖掘筑巢
蚂蚁群可以在不同类型土体中挖掘出形态复杂的巢穴,且不需要额外的衬砌结构[45]。蚂蚁挖掘的显著优点是能耗较低,相较于隧道掘进低2~4个数量级[46]。研究表明,蚂蚁挖掘的性能以及巢穴的稳定性与挖掘深度、土颗粒大小、土体密度、含水率和饱和度等土体条件有关[1, 47]。其中土颗粒大小和土体密度对蚂蚁开挖速度和开挖范围的影响较大,含水率会显著影响巢穴的稳定性,土体饱和度主要会影响单个蚂蚁的挖掘模式。与其他生物土中运动机制只涉及单个生物体不同,蚂蚁挖掘是一种复杂的集体行为,但目前对蚂蚁如何构建宏观稳定巢穴的原理认识尚不充分,筑巢过程中蚂蚁个体间的相互交流协助也未得到较好的解释。此外,蚂蚁挖掘局限于较浅的土层。
(2)岩土工程应用
a)仿生探测器或机器人
仿生探测器或机器人是仿生岩土技术中研究最多的课题之一,主要用于特殊场地勘察、海底勘探等方面。地基原位测试一般依靠静力触探试验、十字板剪切试验等现场试验。当在水下、斜坡、湖沼等场地条件受限地区时,这些试验无法提供足够的反作用力以达到预期深度[48]。此外,这些试验一般只能获取地下离散点的土体参数,或竖向的连续土体参数,使得水平向的土层性质差异往往难以评估。生物土中运动机制可以降低贯入阻力,用于开发新的原位测试工具。一些学者根据蚯蚓蠕动的径向扩张-轴向伸长交替行为开发了自主贯入探针,图 3给出了探针原型和干砂中的贯入试验结果。
![]()
探针由一个可径向扩张的锚固段和一个贯入尖端组成[16, 49],可实现锚固段膨胀锚固-尖端贯入的周期性贯入,即锚固段膨胀锚固、尖端贯入、锚固段收缩、锚固段向下移动、锚固段再膨胀锚固的循环。在自主贯入过程中,锚固段的径向扩张可以阻止探针的后退并降低贯入阻力,并且无需额外的外部推进装置。为了提供足够的锚固力,砂中的锚固段长度L应为尖端直径D的(2.0~4.5)倍,在黏土中L/D = 2.8~4.2[48]。从图 3(b)可以看出,与直接贯入相比,周期性贯入可以有效降低贯入阻力。蛏子的向上伸缩运动方面,Tao等[17]和Huang等[28]开发了可钻出干砂的软体机器人SBOR,其在充气时轴向伸长。SBOR包裹了剪纸启发结构以增强摩擦力,该结构通过将一系列切口嵌入薄塑料片来获得,具备增强SBOR充气时表面摩擦、降低SBOR泄气时表面摩擦的特性。测试发现SBOR在干砂中的钻出性能与砂土相对密度、伸长-收缩周期时间和砂与机器人间的摩擦相互作用有关。此外,Tao等[17]还建立了SBOR钻出干砂的力学分析模型,可以有效预测单个伸长-收缩周期时间对机器人向上运动的影响,但无法有效预测相对密度和饱和度对SBOR钻出砂土的影响。
其余土中运动机制方面,Naclrio等[50]基于颗粒流态化和植物根尖生长开发了一种自生长软体贯入机器人,尖端可以喷出气流软化土体以降低贯入阻力。不同机制的干砂贯入试验结果表明,单一的根尖生长和颗粒流态化都可以有效降低贯入阻力,且两者同时作用的贯入阻力比直接贯入小1个数量级,能以小于20 N的力贯入超过10 cm的深度。Sadeghi等[30, 51-52]基于植物根的生长机制,利用3D打印技术开发了自生长刚柔耦合机器人,可实现土中贯入、转向和避障等功能。增殖材料会随着机器人的运动被添加到末端以模仿根尖生长和细胞脱落,极大地降低了侧向的摩擦阻力,只需克服轴向贯入阻力。该机器人的贯入能耗较传统贯入方法小70%,但速度较慢,仅4 mm/min。
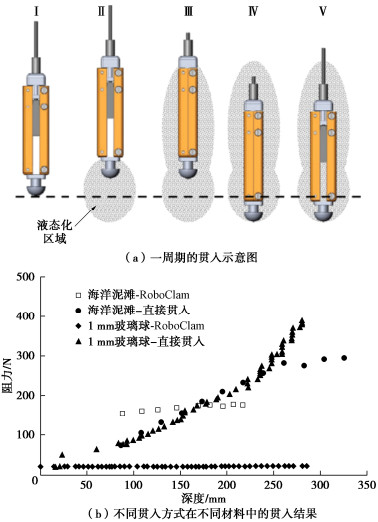
深海海底存在着大量的矿物资源,例如含铜金的硫化物、含镍、铜、钴和锂的多金属结核以及稀土矿物等[53]。矿物开采前需要取样以分析成分构成,目前取样多采用垂直钻探的方式。取样器借助钻探船贯入海底采集土样,其直径一般仅为100 mm。这种方式对于获取垂直方向土样很有效,而对于获取水平方向分布的矿床土样较为低效[6]。生物土中运动机制有助于启发新的多向海底勘探设备[54]。Winter等[55]基于双锚运动和局部流态化开发了仿蛏子机器人RoboClam。RoboClam由气动活塞驱动末端执行器上下和径向运动,以模仿蛏子壳的打开和关闭,可实现土中的循环贯入,一周期最大位移为6.4 mm,图 4给出了RoboClam一个周期的贯入示意图和与直接贯入的阻力对比。可以看出,局部流态化在黏性土和无黏性土中均适用;RoboClam的贯入阻力远小于直接贯入且不随深度变化。但RoboClam在贯入过程中无法排出开挖土体,导致其受土压力的影响较大,开挖深度局限在20~30 cm。为解决这一问题,Tadami等[56]基于蚯蚓蠕动机制开发了可转向的仿蚯蚓钻孔机器人SEAVO。SEAVO由3节人工液压肌肉单元驱动,每节肌肉均可径向扩张和轴向伸长,运动过程中始终有两个单元径向扩张锚固在孔洞内壁,同时已挖出的土体由机器人内部排出,使运动几乎不受土压力的影响。实验室环境下,SEAVO成功在干砂中以1670mm的弯曲半径钻探至613 mm深处,但其无法用于水下砂土。为了将SEAVO应用于海洋钻探,Isaka等[5-6]增设了可降低钻孔阻力的锥形螺旋钻头和增强锚固力的刚毛,并利用水射流技术排出水下开挖土体,开发了SEAVO Ⅱ。测试表明,SEAVO Ⅱ可在水下砂土中钻探至超过650 mm的深度。
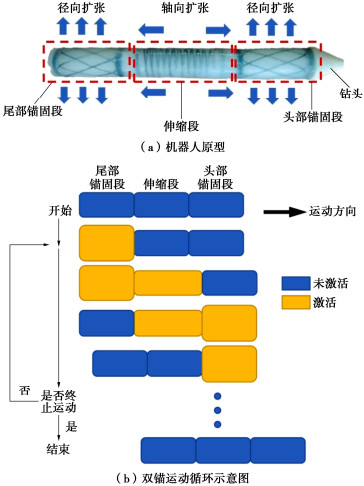
另有一些研究专注于开发可在土中灵活运动的软体机器人。基于双锚运动机制,笔者等利用气动人工肌肉开发了双锚式软体掘进机器人,可实现土中的径向扩张-轴向伸长的周期性双锚循环运动,图 5给出了机器人原型和双锚循环运动示意图。机器人由3个人工气动肌肉串联组成,其中头尾腔室是只可径向扩张的锚固段,中间腔室是只可轴向伸缩的伸缩段。一些其他技术手段被用来帮助机器人在土中掘进,包括前文介绍的受剪纸启发皮肤和锚固段的横向摆动,前者用于减小伸缩段伸长时机器人与土体间的摩擦力并增大锚固段径向扩张时的锚固力,后者用于降低运动阻力。2020年,通用电气公司开发了一款由液压人工肌肉驱动的大型仿蚯蚓掘进机器人,可以独立的同时完成开挖隧道和绕开土中障碍物等功能。该机器人成功在实验室环境下以10 cm/s的速度开挖了一条直径10 cm、长度500 m的隧道[40]。Naclerio等[29]在先前研究[50]的基础上,将机器人头部改进为上下不对称的楔形结构,开发了可在砂中多方向运动的自生长机器人。测试发现,楔形结构可以有效降低机器人水平运动时受到的土体升力。机器人可以在干砂中以2 cm/s的速度掘进至35 cm深处,同时能以4.8 m/s的速度水平运动。此外该机器人非常适用于在低重力的空间环境里钻探。
b)数值仿真模拟
数值仿真模拟中研究最多的是自主贯入机器人贯入过程的离散元DEM模拟[21, 57-61]。模拟中将尖端设置为刚性的锥形尖端,并将贯入过程简化为3步,见图 6(a)。已有研究表明,无黏性土中的自主贯入较黏性土更加困难[48],DEM模拟中土体主要为无黏性颗粒。DEM模拟表明,刚性和柔性锚固段在自主贯入过程中与土体间的相互作用机理是一致的[21, 60]。图 6(b)给出了一个DEM模拟的结果。可以看出,锚固段的径向扩张增大了周围土体的水平有效应力并放松了尖端的土间接触力,降低了尖端贯入阻力[21]。阻力的降低程度与锚固段长度La、锚固段扩张后的直径Da和锚固段与尖端距离H有关。另有关于受开花植物种子旋转埋藏启发的探头旋转贯入过程的模拟[62]。结果表明,旋转会显著减小锥尖与土间的接触力和接触次数,并导致接触力的倾斜。
2.2 土与结构相互作用接触面
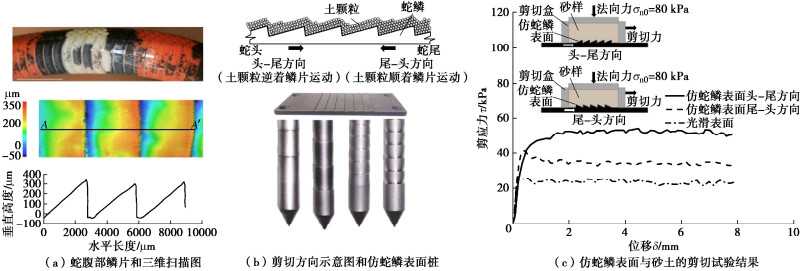
土与结构接触面问题在许多实际工程中广泛存在,对土体、结构物的受力、变形及其相互作用有重要影响。部分结构物在不同阶段需要不同的接触力,如海上风力发电机的桩,其在安装时需要较小的桩侧摩阻力,而在使用时需要较大的桩侧抗拔摩阻力,用以抵御拉拔荷载和循环荷载。蛇腹部鳞片、哺乳动物的牙齿和某些树叶的叶边可以加以借鉴用来开发更高效的应力和变形传递接触面,其中研究最多的是蛇腹部鳞片的摩擦各向异性特性[13]。蛇虽然没有四肢,但其可依靠下腹部横向排列的鳞片与土体间的各向异性摩擦特性在各种复杂环境下灵活运动[19],见图 7(a)。蛇头到蛇尾的方向的摩擦系数大于蛇尾到蛇头的方向,图 7(b)给出了两个剪切方向的示意图。头-尾方向摩擦力较尾-头方向大40%~250%,使得蛇在运动时不会向后滑动[63]。
![]()
Martinez等[13]和O’Hara等[18]利用3D打印技术制作了仿蛇鳞表面并进行了与砂土间的界面剪切试验,将蛇腹鳞结构用于改进土与结构接触面,模型示意图及试验结果见图 7(b),7(c)。结果表明,仿蛇鳞表面头-尾方向和尾-头方向与砂土间的界面剪切阻力均大于光滑表面,头-尾方向的界面剪切阻力较尾-头方向高25%。Huang等[64]发现仿蛇鳞表面在黏土中具有较小的界面受荷各向异性。具有仿蛇磷表面的桩在离心机模型试验中显示了良好的桩侧摩阻力,两种方向的安装和拔出阻力均大于表面光滑的桩,头-尾方向的安装和拔出阻力较尾-头方向分别高48%,128%[18]。Zhong等[65]利用DEM研究了鳞片长度、鳞片高度和贯入方向对具有仿蛇鳞表面的桩贯入干砂地基的影响。结果表明,仿蛇鳞表面桩的桩侧摩阻力较大,头-尾方向贯入的土体扰动范围大于尾-头方向贯入,桩侧摩阻力和土体扰动范围与鳞片高度正相关,与鳞片长度反相关。从上述研究可以看出,目前有关仿蛇鳞表面的研究大多基于砂土开展,且有关仿蛇鳞表面和砂土在接触面上相互作用机理的研究不多,宜进一步开展基于其他土体的物理试验和数值仿真模拟。
2.3 锚固系统
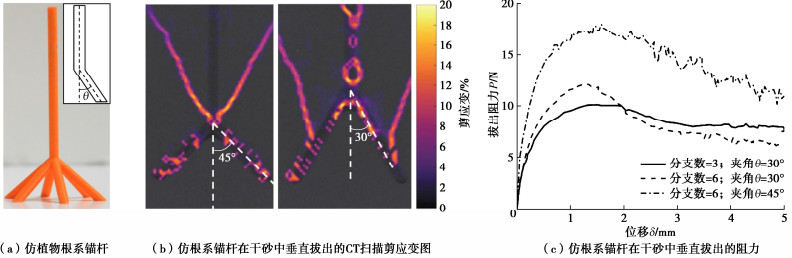
工程上通常使用截面几何形状恒定的线性构件建造基础和锚固系统,既限制了锚固承载力,也造成了材料浪费。树木根系在生长过程中会向各个方向以最优方式生长,且单个主根上有多个分支,是一种高效的锚固系统,同时还可以加固土体[7]。试验数据表明,单位体积或质量下,树木根系结构的抗拉拔力较传统基础高1~2个数量级,其材料利用率远超现有的锚固技术[66]。根系形态和锚固机理可用于改进基础和锚杆,提升锚固力并减少材料的使用。
植物学、土壤学和岩土工程领域都对植物根系锚固机理进行了研究,发现影响根系锚固性能和荷载传递能力的因素有主根分支的数量和角度、根的刚度和土体抗剪强度等[1]。Mallett等[7]利用3D打印研制了仿植物根系锚杆并利用CT扫描研究了其在干砂中垂直拔出过程的土体响应,见图 8。可以看出,单个分支与轴线间的角度决定了剪切带的位置;根系分支越多、单个分支与轴线角度越大,锚杆体系的抗拔强度越高。
![]()
Aleali等[67]将水骨骼的不可压缩封闭充液腔室[31]、蛏子可打开的外壳[15, 36]和用于增强锚固力的蚯蚓刚毛及植物侧根[6, 68]灵活组合,开发了纯膨胀桩、带刚毛膨胀桩和带侧根膨胀桩3种仿生膨胀桩基础。桩的有限元模拟表明,仿生膨胀桩的围压、承载能力和桩侧摩阻力显著大于传统桩。
2.4 其他
生物机制在岩土工程和土木建筑中的启发式应用还包括:受黏菌群觅食行为启发的城市地铁布局优化[69],受植物叶脉启发的天然气输送网络或交通网络优化[8],受蜂巢启发的新型土工合成材料[70],受白蚁巢穴启发的更合理高效的建筑通风系统[1],受蚁群运土行为启发的路径搜索算法[71-72],受蚕丝启发的岩土工程新材料[73]等。例如,Tero等[69]利用黏菌群觅食行为模拟东京地铁线路规划,发现黏菌群形成的路线与东京地铁布局高度重合,且具有更高的运输效率。高玮等[71-72]将仿生蚁群聚类算法用于岩石边坡稳定性分析和深部地下工程岩爆预测,与传统分析及预测方法相比,均取得了准确率较高、计算速度较快的分析及预测结果。
3. 仿生岩土技术的现存挑战与展望
3.1 挑战
目前,有关仿生岩土技术的研究已取得了一些进展,但仍存在许多关键难题。
(1)研究工具的不足
生物较岩土工程系统更加复杂,同时生物机制是多功能的。其向岩土工程的转化势必需要新理论,同时需要新的工具来发展新理论,包括验证新理论所需的试验系统和测量工具等。
(2)尺寸和承受荷载的差异
如前所述,土中生物的尺寸、活动深度和承受荷载较岩土工程系统有显著的差异性。土中生物的活动一般被限制在特定的颗粒大小和深度上,且对生物体尺寸有很强的依赖性,如蚯蚓的蠕动会随着尺寸的增大而低效[74]。因此,需要开发多尺度仿生岩土技术模型,以考察生物机制在岩土工程尺度上的可行性。
(3)材料性能的差异
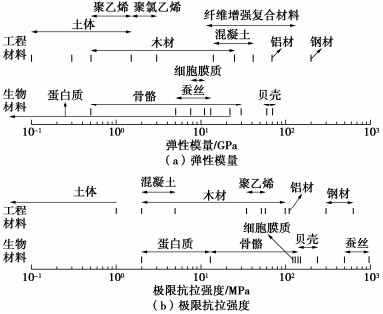
自然生物材料的力学性能通常具有明显的各向异性,与工程材料在力学性能上有显著的差异。图 9给出了常见的自然生物材料与工程材料力学性能对比。可以看出,与工程材料相比,自然生物材料能以较小的弹性模量发挥较高的极限抗拉强度,体现出生物体材料的灵活性。因此,利用生物机制开发新的岩土工程技术和设备时,需要搜寻是否存在适用的工程材料。
![]()
(4)时间花费的不同
与工程施工在数月或数年时间内快速完成不同,部分生物体及其生物机制往往借助自然增长的方式形成,例如树木的根从毫米级生长至米级的复杂根系系统需要几十年甚至几百年的时间[75]。因此,将生物机制脱离原有的时间尺度应用于岩土工程时,需要对时间成本、效益和可靠度等进行评估。
3.2 展望
(1)生物的质量、体积和活动范围远小于岩土工程系统,限制了生物机制应用于岩土工程的潜力。可以借助模糊理论和概率方法等机器学习方法研究生物机制,建立工程尺度下的生物机制评估模型。
(2)自然生物材料和工程材料的力学性能有着显著的差异,限制了生物机制的岩土工程应用。因此,需要研究既能发挥生物机制优势,同时满足工程需要的新型材料。此外,仿生机器人在极端环境下工作时,会受到高地应力、高低温、高水压、低重力等复杂环境约束,需要具有良好抗冲击性能和低摩擦系数的耐热耐磨材料的支持。
(3)目前对生物体的土中运动机制以及受其启发的岩土工程技术研究大多基于均质土开展,如假设土为均质的淤泥或无黏聚力的颗粒[4, 15, 76]。但自然环境中大部分土体都是混合的非均质土。生物在非均质土内的运动机制更加复杂,可能是某几个机制的糅合。因此,有必要研究非均质土中的生物运动机制以及仿生技术和装备。
(4)目前,仿生岩土技术研究较多的生物机制来自于蚯蚓、海洋蠕虫、双壳类生物、蛇和植物根系等。然而,还有许多其他的生物在岩土体表面和内部产生相互作用,如哺乳动物、鱼类、鸟类、爬行动物、细菌和真菌等。研究这些生物与岩土体的相互作用可以开拓研究领域。
(5)当前,仿生岩土技术的研究集中在解决岩土工程的单一问题,如钻探、挖掘和锚固等。但生物机制往往可以实现多个功能,如树根同时满足吸收储存水分、养分及锚固的功能。未来可以利用生物机制开发多功能岩土工程技术和装备。
4. 结语
仿生岩土技术作为一个全新的研究领域,在近些年里取得了一些进展。本文对这些研究进行了回顾和总结。仿生岩土技术是一个具有多样性和独特优势的技术领域。多样性体现在生物与土体相互作用所使用的生物机制丰富、潜在的应用领域广泛。有多种的生物机制可用于开发新的岩土工程技术和装备,文中主要介绍的生物机制包括土中各类生物的运动机制、蛇腹部鳞片各向异性摩擦和树木根系锚固等。仿生岩土技术有着一定的应用可能性,包括场地勘察、海洋勘探、土中掘进、土与结构相互作用接触面和锚固系统等。生物机制的独特优势包括低能耗、多功能性和可持续性,这为岩土工程技术和装备提供新的设计思想,并有潜力用于解决各类复杂的岩土工程问题。此外,本文还分析了仿生岩土技术的现存挑战和未来发展方向。
借用生物机制开发新的岩土工程技术,需要仔细评估生物系统与工程系统间的差异,包括尺寸、活动深度、承受荷载和实施时间等。仿生岩土技术虽然得到了一些研究进展,但是离系统化的工程应用还有较远的距离。仿生岩土技术作为一项跨学科的研究方向,需要岩土工程领域与生物学、材料学、机器人科学等领域之间的充分合作。
-
![]()
![]()
![]()
-
[1] MARTINEZ A, DEJONG J, AKIN I, et al. Bio-inspired geotechnical engineering: principles, current work, opportunities and challenges[J]. Géotechnique, 2022, 72(8): 687-705. doi: 10.1680/jgeot.20.P.170
[2] 何稼, 楚剑, 刘汉龙, 等. 微生物岩土技术的研究进展[J]. 岩土工程学报, 2016, 38(4): 643-653. doi: 10.11779/CJGE201604008 HE Jia, CHU Jian, LIU Hanlong, et al. Research advances in biogeotechnologies[J]. Chinese Journal of Geotechnical Engineering, 2016, 38(4): 643-653. (in Chinese) doi: 10.11779/CJGE201604008
[3] 徐华, 袁海莉, 王歆宇, 等. 根系形态和层次结构对根土复合体力学特性影响研究[J]. 岩土工程学报, 2022, 44(5): 926-935. doi: 10.11779/CJGE202205016 XU Hua, YUAN Haili, WANG Xinyu, et al. Influences of morphology and hierarchy of roots on mechanical characteristics of root-soil composites[J]. Chinese Journal of Geotechnical Engineering, 2022, 44(5): 926-935. (in Chinese) doi: 10.11779/CJGE202205016
[4] ORTIZ D, GRAVISH N, TOLLEY M T. Soft robot actuation strategies for locomotion in granular substrates[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2630-2636. doi: 10.1109/LRA.2019.2911844
[5] ISAKA K, TSUMURA K, WATANABE T, et al. Soil discharging mechanism utilizing water jetting to improve excavation depth for seabed drilling explorer[J]. IEEE Access, 2020, 8: 28560-28570. doi: 10.1109/ACCESS.2020.2972572
[6] ISAKA K, TSUMURA K, WATANABE T, et al. Development of underwater drilling robot based on earthworm locomotion[J]. IEEE Access, 2019, 7: 103127-103141. doi: 10.1109/ACCESS.2019.2930994
[7] MALLETT S D, MATSUMURA S, DAVID FROST J. Additive manufacturing and computed tomography of bio-inspired anchorage systems[J]. Géotechnique Letters, 2018, 8(3): 219-225. doi: 10.1680/jgele.18.00090
[8] PATINO-RAMIREZ F, ARSON C. Transportation networks inspired by leaf venation algorithms[J]. Bioinspiration & Biomimetics, 2020, 15(3): 036012.
[9] KAR A K. Bio-inspired computing: a review of algorithms and scope of applications[J]. Expert Systems With Applications, 2016, 59: 20-32. [10] DEJONG J T, BURRALL M, WILSON D W, et al. A bio-inspired perspective for geotechnical engineering innovation[C]// Proceeding of Geotechnical Frontiers 2017: Transportation Facilities, Structures, and Site Investigation. Orlando, 2017: 862-870.
[11] GOEL A K, VATTAM S, WILTGEN B, et al. Information-processing theories of biologically inspired design[M]//Biologically Inspired Design. London: Springer London, 2013: 127-152. [12] MAK T W, SHU L H. Abstraction of biological analogies for design[J]. CIRP Annals, 2004, 53(1): 117-120. doi: 10.1016/S0007-8506(07)60658-1
[13] MARTINEZ A, PALUMBO S, TODD B D. Bioinspiration for anisotropic load transfer at soil–structure interfaces[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2019, 145(10): 04019074. doi: 10.1061/(ASCE)GT.1943-5606.0002138
[14] SHIN H, SANTAMARINA J C. Open-mode discontinuities in soils[J]. Géotechnique Letters, 2011, 1(4): 95-99. doi: 10.1680/geolett.11.00014
[15] DORGAN K M. The biomechanics of burrowing and boring[J]. Journal of Experimental Biology, 2015, 218(2): 176-183. doi: 10.1242/jeb.086983
[16] BORELA R, FROST J D, VIGGIANI G, et al. Earthworm-inspired robotic locomotion in sand: an experimental study using X-ray tomography[J]. Géotechnique Letters, 2021, 11(1): 66-73. http://www.researchgate.net/publication/348936188_Earthworm-inspired_robotic_locomotion_in_sand_an_experimental_study_with_X-ray_tomography
[17] TAO J J, HUANG S C, TANG Y. SBOR: a minimalistic soft self-burrowing-out robot inspired by razor clams[J]. Bioinspiration & Biomimetics, 2020, 15(5): 055003. http://pubmed.ncbi.nlm.nih.gov/32259805/
[18] O'HARA K B, MARTINEZ A. Monotonic and cyclic frictional resistance directionality in Snakeskin-inspired surfaces and piles[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2020, 146(11): 04020116. doi: 10.1061/(ASCE)GT.1943-5606.0002368
[19] BAUM M J, KOVALEV A E, MICHELS J, et al. Anisotropic friction of the ventral scales in the snake Lampropeltis getula Californiae[J]. Tribology Letters, 2014, 54(2): 139-150. doi: 10.1007/s11249-014-0319-y
[20] MOSELEY P, FLOREZ J M, SONAR H A, et al. Modeling, design, and development of soft pneumatic actuators with finite element method[J]. Advanced Engineering Materials, 2016, 18(6): 978-988. doi: 10.1002/adem.201500503
[21] CHEN Y Y, KHOSRAVI A, MARTINEZ A, et al. Modeling the self-penetration process of a bio-inspired probe in granular soils[J]. Bioinspiration & Biomimetics, 2021, 16(4): 046012. http://pubmed.ncbi.nlm.nih.gov/33794505/
[22] LI C, ZHANG T N, GOLDMAN D I. A terradynamics of legged locomotion on granular media[J]. Science, 2013, 339(6126): 1408-1412. doi: 10.1126/science.1229163
[23] TRIVEDI D, RAHN C D, KIER W M, et al. Soft robotics: biological inspiration, state of the art, and future research[J]. Applied Bionics and Biomechanics, 2008, 5(3): 99-117. doi: 10.1155/2008/520417
[24] KIM S, LASCHI C, TRIMMER B. Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013, 31(5): 287-294. doi: 10.1016/j.tibtech.2013.03.002
[25] SHAH D S, POWERS J P, TILTON L G, et al. A soft robot that adapts to environments through shape change[J]. Nature Machine Intelligence, 2021, 3(1): 51-59. http://www.xueshufan.com/publication/3107437201
[26] RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543
[27] LIU B Y, OZKAN-AYDIN Y, GOLDMAN D I, et al. Kirigami skin improves soft earthworm robot anchoring and locomotion under cohesive soil[C]// 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). Seoul, 2019: 828-833.
[28] HUANG S C, TANG Y, BAGHERI H, et al. Effects of friction anisotropy on upward burrowing behavior of soft robots in granular materials[J]. Advanced Intelligent Systems, 2020, 2(6): 1900183. doi: 10.1002/aisy.201900183
[29] NACLERIO N D, KARSAI A, MURRAY-COOPER M, et al. Controlling subterranean forces enables a fast, steerable, burrowing soft robot[J]. Science Robotics, 2021, 6(55): eabe2922. doi: 10.1126/scirobotics.abe2922
[30] SADEGHI A, TONAZZINI A, POPOVA L, et al. A novel growing device inspired by plant root soil penetration behaviors[J]. PLoS One, 2014, 9(2): e90139. doi: 10.1371/journal.pone.0090139
[31] KIER W M. The diversity of hydrostatic skeletons[J]. Journal of Experimental Biology, 2012, 215(8): 1247-1257. doi: 10.1242/jeb.056549
[32] DORGAN K M. Kinematics of burrowing by peristalsis in granular sands[J]. Journal of Experimental Biology, 2018, 221(10): jeb167759.
[33] DORGAN K M, ARWADE S R, JUMARS P A. Burrowing in marine muds by crack propagation: kinematics and forces[J]. Journal of Experimental Biology, 2007, 210(23): 4198-4212. doi: 10.1242/jeb.010371
[34] RUIZ S, OR D, SCHYMANSKI S J. Soil penetration by earthworms and plant roots: mechanical energetics of bioturbation of compacted soils[J]. PLoS One, 2015, 10(6): e0128914. doi: 10.1371/journal.pone.0128914
[35] HOLLAND A F, DEAN J M. The biology of the stout razor clam tagelus plebeius: Ⅰ Animal-sediment relationships, feeding mechanism, and community biology[J]. Chesapeake Science, 1977, 18(1): 58-66. doi: 10.2307/1350364
[36] WINTER A G, DEITS R L, HOSOI A E. Localized fluidization burrowing mechanics of ensis directus[J]. Journal of Experimental Biology, 2012, 215(12): 2072-2080. doi: 10.1242/jeb.058172
[37] CLARK L J, WHALLEY W R, BARRACLOUGH P B. How do roots penetrate strong soil? [M]//Roots: The Dynamic Interface between Plants and the Earth. Dordrecht: Springer Netherlands, 2003: 93-104.
[38] SADEGHI A, TONAZZINI A, POPOVA L, et al. Robotic mechanism for soil penetration inspired by plant root[C]// 2013 IEEE International Conference on Robotics and Automation. Paris, 2013: 3457-3462.
[39] DEL DOTTORE E, MONDINI A, SADEGHI A, et al. An efficient soil penetration strategy for explorative robots inspired by plant root circumnutation movements[J]. Bioinspiration & Biomimetics, 2017, 13(1): 015003. http://pubmed.ncbi.nlm.nih.gov/29123076/
[40] WEI H Y, ZHANG Y L, ZHANG T, et al. Review on bioinspired planetary regolith-burrowing robots[J]. Space Science Reviews, 2021, 217(8): 87. doi: 10.1007/s11214-021-00863-2
[41] SHARPE S S, KUCKUK R, GOLDMAN D I. Controlled preparation of wet granular media reveals limits to lizard burial ability[J]. Physical Biology, 2015, 12(4): 046009. doi: 10.1088/1478-3975/12/4/046009
[42] MCKEE A, MACDONALD I, FARINA S C, et al. Undulation frequency affects burial performance in living and model flatfishes[J]. Zoology, 2016, 119(2): 75-80. doi: 10.1016/j.zool.2015.12.004
[43] MALADEN R D, DING Y, LI C, et al. Undulatory swimming in sand: subsurface locomotion of the sandfish lizard[J]. Science, 2009, 325(5938): 314-318. doi: 10.1126/science.1172490
[44] MALADEN R D, DING Y, UMBANHOWAR P B, et al. Mechanical models of sandfish locomotion reveal principles of high performance subsurface sand-swimming[J]. Journal of the Royal Society, Interface, 2011, 8(62): 1332-1345. doi: 10.1098/rsif.2010.0678
[45] BUARQUE DE MACEDO R, ANDÒ E, JOY S, et al. Unearthing real-time 3D ant tunneling mechanics[J]. Proceedings of the National Academy of Sciences, 2021, 118(36): e2102267118. doi: 10.1073/pnas.2102267118
[46] IAI S. Geotechnics and Earthquake Geotechnics Towards Global Sustainability[M]. Dordrecht: Springer, 2011.
[47] MONAENKOVA D, GRAVISH N, RODRIGUEZ G, et al. Behavioral and mechanical determinants of collective subsurface nest excavation[J]. The Journal of Experimental Biology, 2015, 218(9): 1295-1305. doi: 10.1242/jeb.113795
[48] MARTINEZ A, DEJONG J T, JAEGER R A, et al. Evaluation of self-penetration potential of a bio-inspired site characterization probe by cavity expansion analysis[J]. Canadian Geotechnical Journal, 2020, 57(5): 706-716. doi: 10.1139/cgj-2018-0864
[49] CORTES D, JOHN S. Earthworm-inspired soil penetration[C]// Proceedings of Biomediated and Bioinspired Geotechnics. 2018.
[50] NACLERIO N D, HUBICKI C M, AYDIN Y O, et al. Soft robotic burrowing device with tip-extension and granular fluidization[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2018: 5918-5923.
[51] SADEGHI A, DEL DOTTORE E, MONDINI A, et al. Passive morphological adaptation for obstacle avoidance in a self-growing robot produced by additive manufacturing[J]. Soft Robotics, 2020, 7(1): 85-94. doi: 10.1089/soro.2019.0025
[52] SADEGHI A, MONDINI A, MAZZOLAI B. Toward self-growing soft robots inspired by plant roots and based on additive manufacturing technologies[J]. Soft Robotics, 2017, 4(3): 211-223. doi: 10.1089/soro.2016.0080
[53] WEDDING L M, REITER S M, SMITH C R, et al. Managing mining of the deep seabed[J]. Science, 2015, 349(6244): 144-145. doi: 10.1126/science.aac6647
[54] JACOBSTEIN N, BELLINGHAM J, YANG G Z. Robotics for space and marine sciences[J]. Science Robotics, 2017, 2(7): eaan5594. doi: 10.1126/scirobotics.aan5594
[55] WINTER A G, V, DEITS R H, et al. Razor clam to RoboClam: burrowing drag reduction mechanisms and their robotic adaptation[J]. Bioinspiration & Biomimetics, 2014, 9(3): 036009. http://www.bioone.org/servlet/linkout?suffix=bibr23&dbid=16&doi=10.2983%2F035.034.0109&key=10.1088%2F1748-3182%2F9%2F3%2F036009
[56] TADAMI N, NAGAI M, NAKATAKE T, et al. Curved excavation by a sub-seafloor excavation robot[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York, 2017: 4950-4956.
[57] CHEN Y, KHOSRAVI A, MARTINEZ A, et al. Analysis of the self-penetration process of a bio-inspired in situ testing probe[C]// Proceeding of Geo-congress 2020: Biogeotechnics. Minneapolis, 2020: 224-232.
[58] HUANG S, TAO J. Bio-inspired dual-anchor burrowing: effect of vertical curvature of the shell[C]// Proceeding of Geo-Congress 2020: Biogeotechnics. Minneapolis, 2020: 282-292.
[59] KHOSRAVI A, MARTINEZ A, DEJONG J, et al. Discrete element simulations of bio-inspired self-burrowing probes in sands of varying density[C]// Proceedings of Biomediated and Bioinspired Geotechnics. 2018.
[60] MA Y F, CORTES D D. 2D DEM analysis of the interactions between bio-inspired geo-probe and soil during inflation-deflation cycles[J]. Granular Matter, 2020, 22(11): 1-14. doi: 10.1007/s10035-019-0974-7
[61] HUANG S C, TAO J L. Modeling clam-inspired burrowing in dry sand using cavity expansion theory and DEM[J]. Acta Geotechnica, 2020, 15(8): 2305-2326. doi: 10.1007/s11440-020-00918-8
[62] TANG Y, TAO J L. Multiscale analysis of rotational penetration in shallow dry sand and implications for self-burrowing robot design[J]. Acta Geotechnica, 2022, 17(10): 4233-4252. doi: 10.1007/s11440-022-01492-x
[63] MARVI H, BRIDGES J, HU D L. Snakes mimic earthworms: propulsion using rectilinear travelling waves[J]. Journal of the Royal Society Interface, 2013, 10(84): 20130188. doi: 10.1098/rsif.2013.0188
[64] HUANG L, MARTINEZ A. Load transfer anisotropy at snakeskin-inspired clay-structure interfaces[C]// Proceedings of International Foundations Congress and Equipment Expo 2021: Geoenvironmental Engineering, Geomaterial Modeling, Transportation Geotechnics, and Case Histories. Dallas, 2021: 119-129.
[65] ZHONG W H, LIU H L, WANG Q, et al. Investigation of the penetration characteristics of snake skin-inspired pile using DEM[J]. Acta Geotechnica, 2021, 16(6): 1849-1865. doi: 10.1007/s11440-020-01132-2
[66] BURRALL M, DEJONG J T, MARTINEZ A, et al. Vertical pullout tests of orchard trees for bio-inspired engineering of anchorage and foundation systems[J]. Bioinspiration & Biomimetics, 2020, 16(1): 016009. http://pubmed.ncbi.nlm.nih.gov/33252054/
[67] ALEALI S A, BANDINI P, NEWTSON C M. Multifaceted bioinspiration for improving the shaft resistance of deep foundations[J]. Journal of Bionic Engineering, 2020, 17(5): 1059-1074. doi: 10.1007/s42235-020-0076-6
[68] ZHU H, ZHANG L M. Root-soil-water hydrological interaction and its impact on slope stability[J]. Georisk: Assessment and Management of Risk for Engineered Systems and Geohazards, 2019, 13(4): 349-359. doi: 10.1080/17499518.2019.1616098
[69] TERO A, TAKAGI S, SAIGUSA T, et al. Rules for biologically inspired adaptive network design[J]. Science, 2010, 327(5964): 439-442. doi: 10.1126/science.1177894
[70] ARAB M G, OMAR M, ALOTAIBI E, et al. Bio-inspired 3D-printed honeycomb for soil reinforcement[C]// Geo-Congress 2020: Biogeotechnics. Reston, 2020: 262-271.
[71] 高玮. 基于蚁群聚类算法的岩石边坡稳定性分析[J]. 岩土力学, 2009, 30(11): 3476-3480. doi: 10.3969/j.issn.1000-7598.2009.11.043 GAO Wei. Analysis of stability of rock slope based on ant colony clustering algorithm[J]. Rock and Soil Mechanics, 2009, 30 (11): 3476-3480. (in Chinese) doi: 10.3969/j.issn.1000-7598.2009.11.043
[72] 高玮. 基于蚁群聚类算法的岩爆预测研究[J]. 岩土工程学报, 2010, 32(6): 874-880. http://www.cgejournal.com/cn/article/id/13417 GAO Wei. Prediction of rock burst based on ant colony clustering algorithm[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(6): 874-880. (in Chinese) http://www.cgejournal.com/cn/article/id/13417
[73] FRATZL P. Biomimetic materials research: what can we really learn from nature's structural materials?[J]. Journal of the Royal Society Interface, 2007, 4(15): 637-642. doi: 10.1098/rsif.2007.0218
[74] QUILLIN K J. Ontogenetic scaling of burrowing forces in the earthworm Lumbricus terrestris[J]. Journal of Experimental Biology, 2000, 203(18): 2757-2770. doi: 10.1242/jeb.203.18.2757
[75] WEATHERSPOON C P. Sequoiadendron giganteum (Lindl. ) Buchholz Giant Sequoia[J]. Silvics of North America, 1990, 1: 552-562. http://www.calfire.ca.gov/resource_mgt/downloads/reports/GiantSequoia.pdf
[76] CHE J, DORGAN K M. It's tough to be small: dependence of burrowing kinematics on body size[J]. Journal of Experimental Biology, 2010, 213(8): 1241-1250. doi: 10.1242/jeb.038661
-
期刊类型引用(2)
1. 曹苏南,李春红,陈远兵,费康. 循环荷载作用下砂土-结构物仿生界面剪切特性研究. 岩土力学. 2025(03): 821-832 .  百度学术
百度学术
2. 王雨航,刘乃飞,赵家伟,于泽铭. 2012—2021年间岩土工程领域国家基金资助情况探析. 市政技术. 2024(01): 86-93+224 . 百度学术
其他类型引用(1)
-
其他相关附件
 下载:
下载:


计量
- 文章访问数: 919
- HTML全文浏览量: 130
- PDF下载量: 306
- 被引次数: 3